Speed Reference 2-173
For example, to send out a command frequency of 60 Hz with [Maximum
Freq] = 70 Hz, we would calculate the following:
Jog
When the drive is not running, pressing the HIM Jog button or a
programmed Jog digital input will cause the drive to jog at a separately
programmed jog reference. This speed reference value is entered in [Jog
Speed], parameter 100.
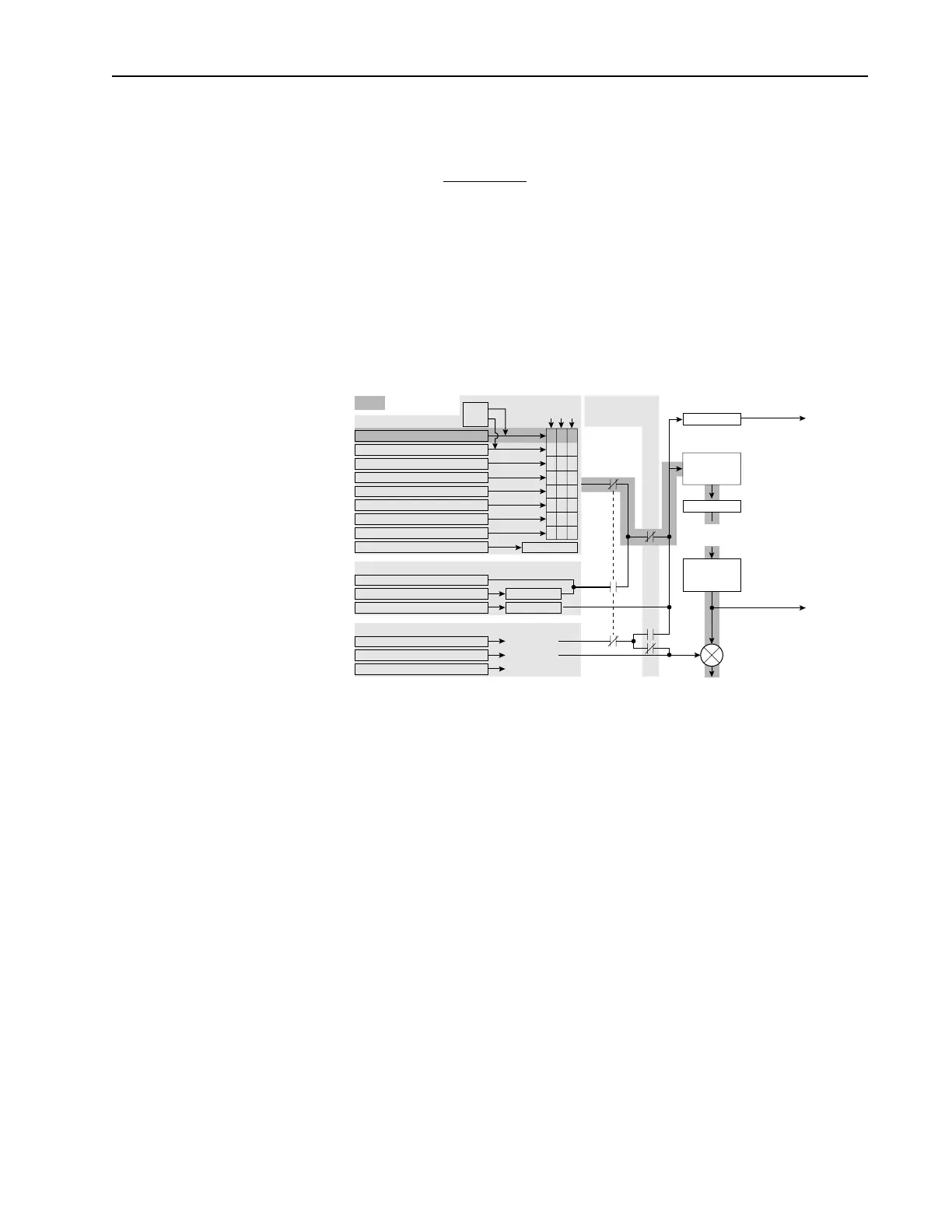
Figure 2.34 Speed Reference Selection
Scaling
Scaling applies only to references from analog inputs and reference sources
selected in [Speed Ref x Sel], parameters 90/93.
Each analog input has its own set of scale parameters:
• [Analog In x Hi] sets the maximum level on input to be seen (i.e. 10
Volts).
• [Analog In x Lo] sets the minimum level on input to be seen (i.e. 0
Volts).
Each [Speed Ref x Sel] parameter has an additional set of scale parameters:
• [Speed Ref x Hi] selects the reference value for the maximum input
specified in [Analog In x Hi].
• [Speed Ref x Lo] selects the reference value for the minimum input
specified in [Analog In x Lo].
SpeedRef =
60 Hz
70 Hz
x 32767 = 28086
= Default
Speed Ref B Sel, Parameter 093
Preset Speed 2, Parameter 102
Preset Speed 3, Parameter 103
Preset Speed 4, Parameter 104
Preset Speed 5, Parameter 105
Preset Speed 6, Parameter 106
Preset Speed 7, Parameter 107
TB Man Ref Sel, Parameter 096
Digital Input
DPI Port Ref 1-6, See Parameter 209 DPI Command
Jog Speed, Parameter 100
Jog Command
HIM Requesting Auto/Manual
Tr im
[Digital Inx Select]:
Speed Sel
321
001
011
010
100
101
110
111
Auto
Man
Drive Ref Rslt
Commanded
Frequency
Min/Max Speed
Acc/Dec Ramp
and
S Curve
Pure Reference
Post Ramp
to follower drive for
Frequency Referenc
to follower drive for
Frequency Referenc
Auto Speed Ref Options
Manual Speed Ref Options
Slip Compensation
1 "Slip Comp"
None
0 "Open Loop"
PI Output 2 "Process Pi"
Speed Adders [Speed Mode]:
PI Exclusive Mode
[PI Configuration]:
Bit 0, Excl Mode = 0
Output Frequency
Mod Functions
(Skip, Clamp,
Direction, etc.)
Speed Ref A Sel, Parameter 090
000

 Loading...
Loading...








