172
SV200 AC Servo Drive User Manual
920-0096H
2/6/2018
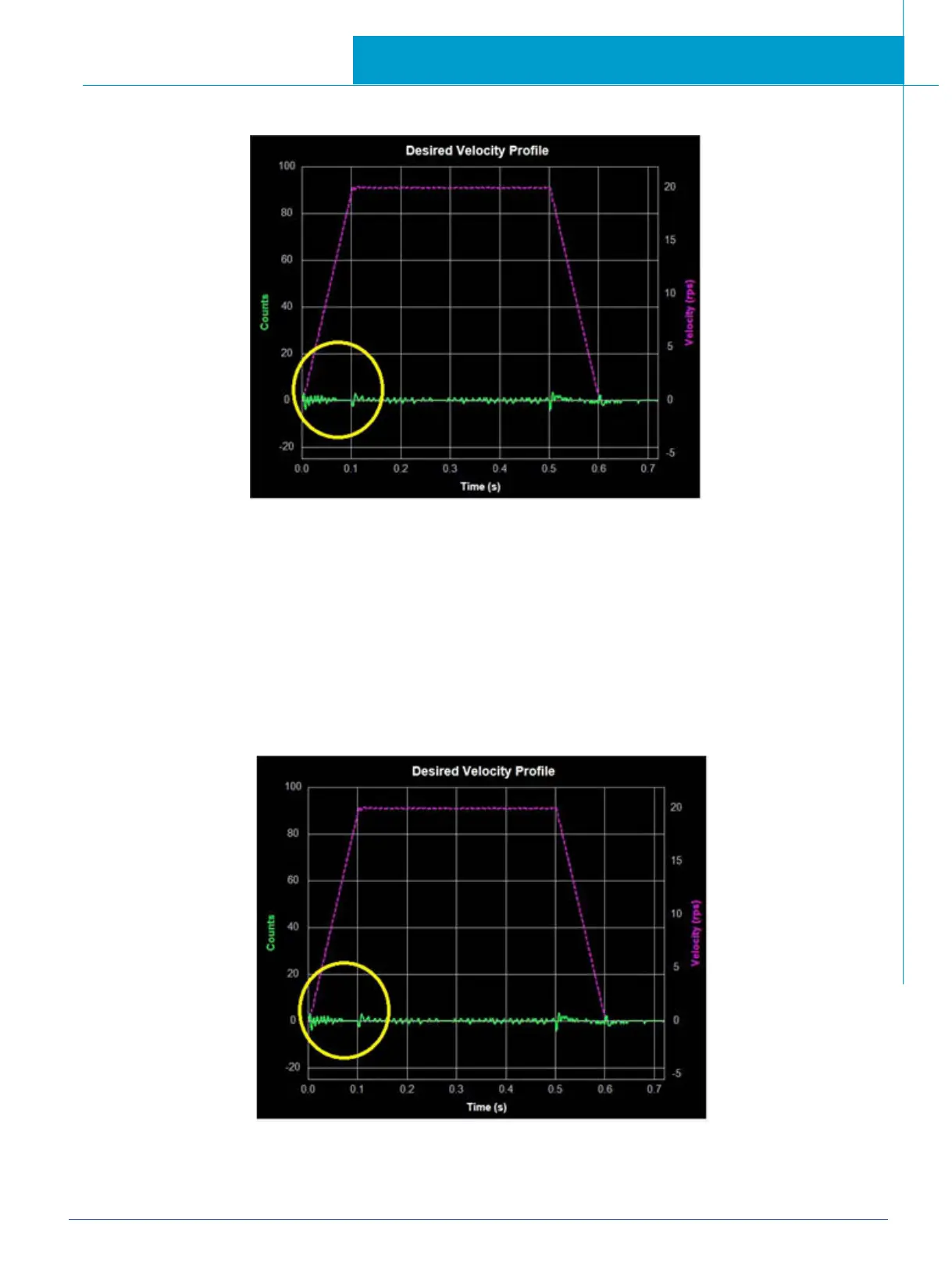
When KV is too large, however, the strong damping gyellow below:
KV = 32000 (too large)
10.3.4 Derivative gain (KD)
A simple PI controller without Derivative gain (KD) would cause the motor to overreact to small errors, creating ever larger errors and,
ultimately becoming unstable. If you knew what the motor was going to do before it did it, this behavior could be prevented. When
pulling a car into a garage, for example, most people do not wait until the car is fully into the garage before stepping on the brakes.
Instead, most people slow down as they see the distance between them and their objective get smaller.
A motor drive can control a motor better if it examines the rate of change of the position error and includes that in its torque
calculation. So, as the position error decreases, the torque commanded to the motor can be reduced with the appropriate KD setting.
In the example shown below, when KD is small, the system does not settle quickly after changes in the move profile. Instead, the
response indicates that the motor is oscillating around the target position that is being defined throughout the move profile.
KD = 3000 (too small)

 Loading...
Loading...