90
SV200 AC Servo Drive User Manual
920-0096H
2/6/2018
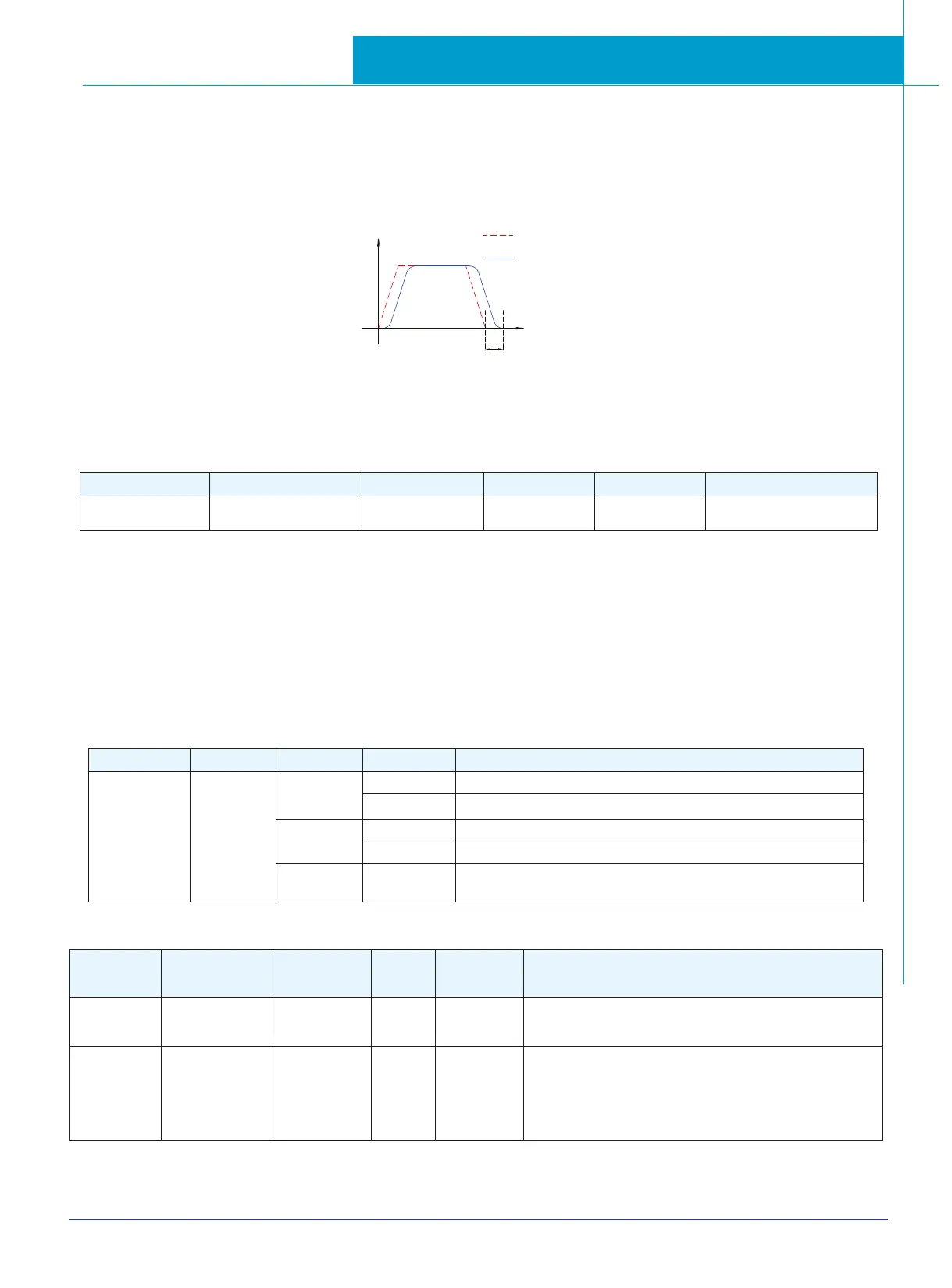
7.2.8 Jerk Smoothing Filter
Applying this dynamic filter on speed and direction signals can significantly smooth motor rotary motion, and minimize wear on
mechanical system components.
Jerk smoothing filter effects are as follows:
Instruction
Time
Target Curve
Actual Curve
T
1) The smaller value of P-07 (KJ), the stronger the effect it will be.
2) Jerk smoothing filter will cause command delay time T, but it will not effect in position accuracy.
Parameter Setting
Parameter Name Data Range Default LED Display Description
P-07 (KJ) Jerk Filter Frequency 0~5000 5000 5000
Set jerk smoothing lter
parameter
NOTE: Setting to 0, means no filter effect.
7.2.9 In-Position Error Output
In position mode, using the “in-position error output” function can help the user define the motor’s in-position status. When the
difference between drive’s total pulses received and motor’s actual rotating pulse count is within the in position error range, the drive
will send out a motor in position signal.
The forth digit of parameter P-68 (MO) defines Y6 output function. parameter P-46 (PD) defines the in- position error range. P-47 (PE)
defines in position error time duration. If the in position error is within the P-46 (PD) range for more than the time duration of P-47
(PE) setting, the drive will output the motor in position signal.
Signal Name PIN P-68 (MO) Condition Function
Y6
Y6+ (14)
Y6- (13)
5□□□
Closed Closed means motor not in position
Open Open means motor in position
4□□□
Closed Close means motor in position
Open Open means motor not in position
3□□□
(default)
General purpose output, function disabled
Parameters Setting
Parameter Name Data Range Default
LED
Display
Description
P-46 (PD)
In position error
range
0~32000 10 10
This parameter sets the in position error range, when in position
error count is less than the range, drive will indicate motor in
position.
P-47 (PE)
In position
duration count
0~32000 10 10
If the position error is in the in-position range and lasts longer
than the duration time, the motion is considered to be complete
and the motor is in position. If the time value is set to 100 the
position error must remain in the range for 100 processor cycles
before the motion is considered to be complete.
One processor cycle is 250µsec.

 Loading...
Loading...