15
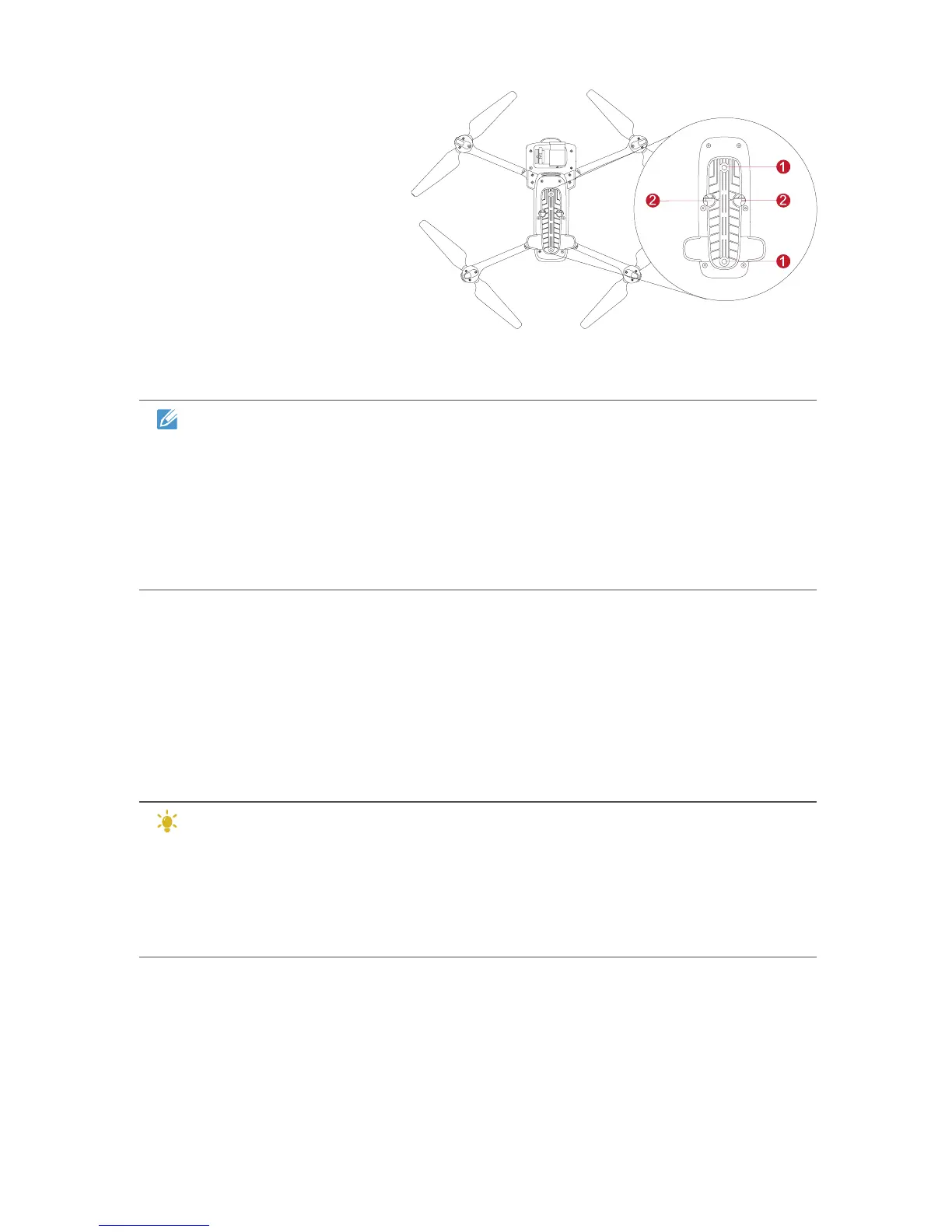
EVO Starpoint
TM
Positioning
System functions through
Binocular Cameras① and
two Ultrasonic Sensors② on
the bottom of the aircraft. The
sensors calculate the current
height of the aircraft using
ultrasound, and the camera
obtains location information
via image analysis. When
ying indoors or in another environment where a GPS signal is unavailable,
Starpoint
TM
Positioning System allows the aircraft to hover in place precisely.
NOTE
• The Starpoint
TM
Positioning System is activated by default when the
aircraft is powered on.
• It works both in GPS and ATTI modes.
• It is only enabled when the aircraft is between 0.5m and 10m above the
surface.
Forward Vision System & Rear Avoidance Sensors
The Forward Vision System on the front of the aircraft uses image data to
calculate the distance between the aircraft and potential obstacles. The system
will halt EVO’s forward progress when an obstacle is detected. Infrared sensors
detect motion and measure any heat being emitted by potential obstacles to the
rear of the aircraft.
TIPS
• Always keep the binocular camera lens clean.
• When the Starpoint
TM
Positioning System is activated, don’t use other
40KHz ultrasonic devices nearby, such as ultrasonic rangenders, fault
detectors, cleaners or welding machines.