Base Ao1 (Pin21) Base Ao2 (Pin 23)
GND (Pin 23) GND (Pin 24)
Signal Min Typ Max
DAC Resolution - 12-bit -
V
AV
Voltage mode outputs 0V - 10V
I
AI
Current mode outputs 4mA - 20mA
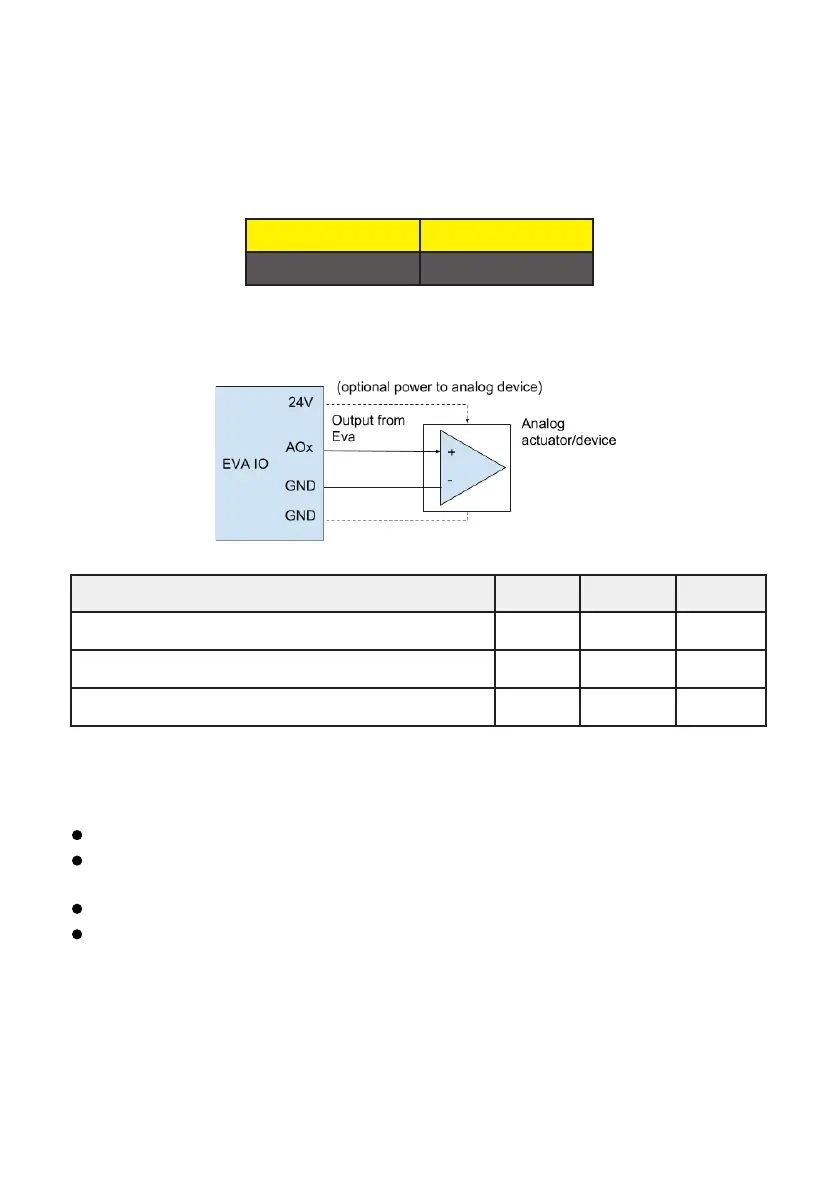
E) Analog Outputs
There are two non-differential, single ended analog outputs on the base I/O,
configurable as current (4 - 20 mA) or voltage (0 - 10 V) mode. The mode can be
specified in Choreograph, or via API calls.
They can, for example, be used to control a gripper with an analog position
control input.
Current mode will usually be more immune to noise that voltage mode
Use screened cable to improve noise immunity. Ground the screen at one
side only
Keep connections as short as possible, with a maximum length of 3 m
Connect to the ground pin closest to the analog I/O on the robot
Advice for getting a clean analog signal:
22