Operation
EL6900 33Version: 3.1.0
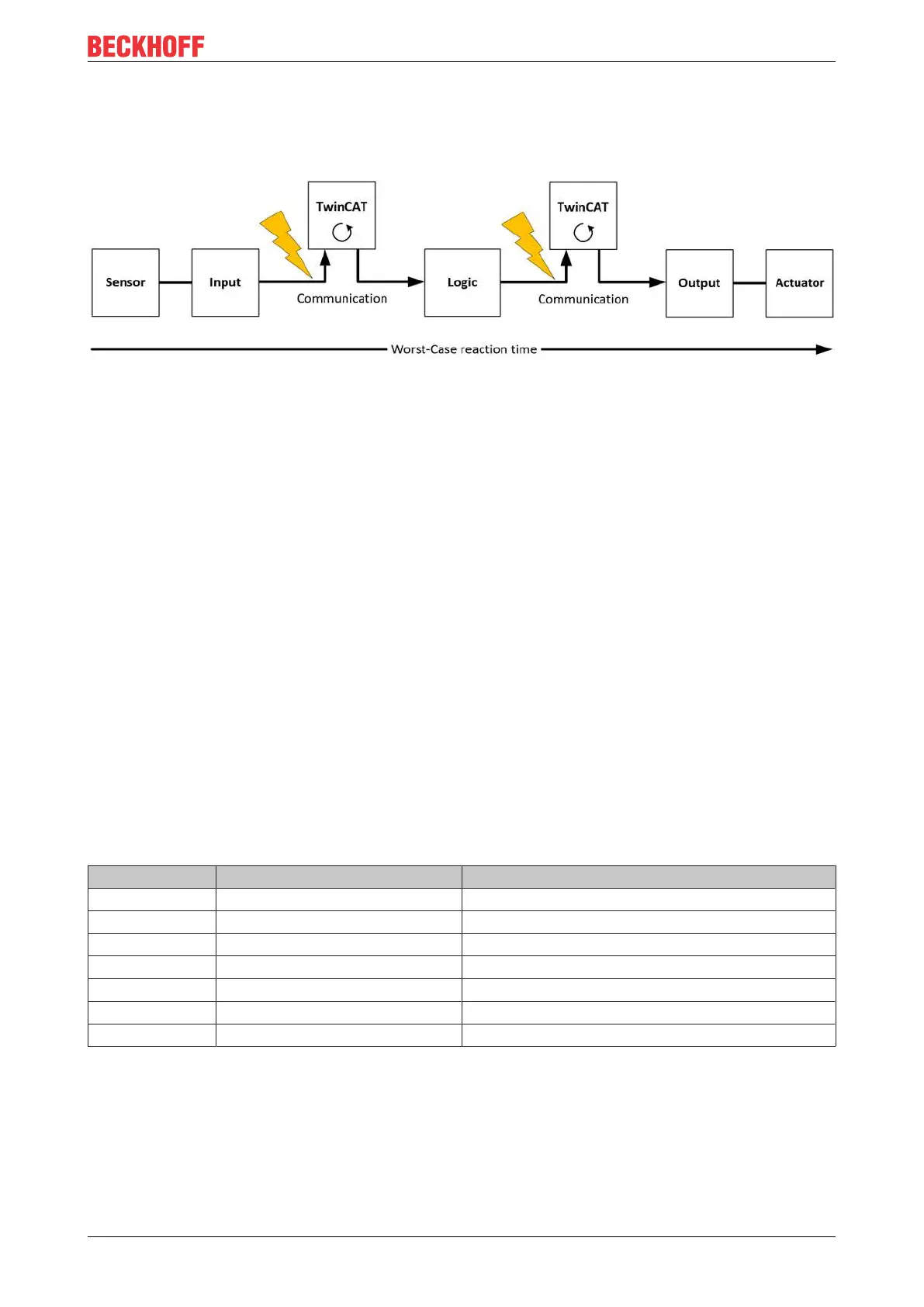
5.2.5.2 Worst case response time
The worst-case response time is the maximum time required for switching off the actuator in the event of an
error.
Fig.14: Worst case response time
It is assumed that a signal change takes place at the sensor, and that this is passed to the input. A
communication error occurs just at the moment when the signal is to be passed to the communication
interface. This is detected by the logic once the watchdog time of the communication connection has
elapsed. This information should then be passed on to the output, resulting in a further communication error.
This fault is detected at the output once the watchdog time has elapsed, resulting in shutdown.
This results in the following formula for the worst-case response time:
max Comm Comm Actuator
ReactionTime WD WD RT= + +
with
15 15 20 50
max
ReactionTime ms ms ms ms= + + =
5.2.6 Tested EL1904 devices
The following list contains devices that were tested together with the EL1904 TwinSAFE terminal. The
results only apply for the current device hardware version at the time of testing. The tests were carried out in
a laboratory environment. Modifications of these products cannot be considered here. If you are unsure
please test the hardware together with the TwinSAFE terminal.
Manufacturer Type Comment
SICK C4000 Safety light curtain
SICK S3000 Safety laser scanner
Wenglor SG2-14ISO45C1 Safety light grids
Leuze lumiflex ROBUST 42/43/44 Safety light barriers
Schmersal BNS250-11ZG Safety switch
ifm GM701S Inductive safety sensor
Keyence SL-V (with PNP cable set) Safety light curtain
The tests were carried out as function tests only. The information provided in the respective manufacturer
documentation remains valid.
 Loading...
Loading...