5
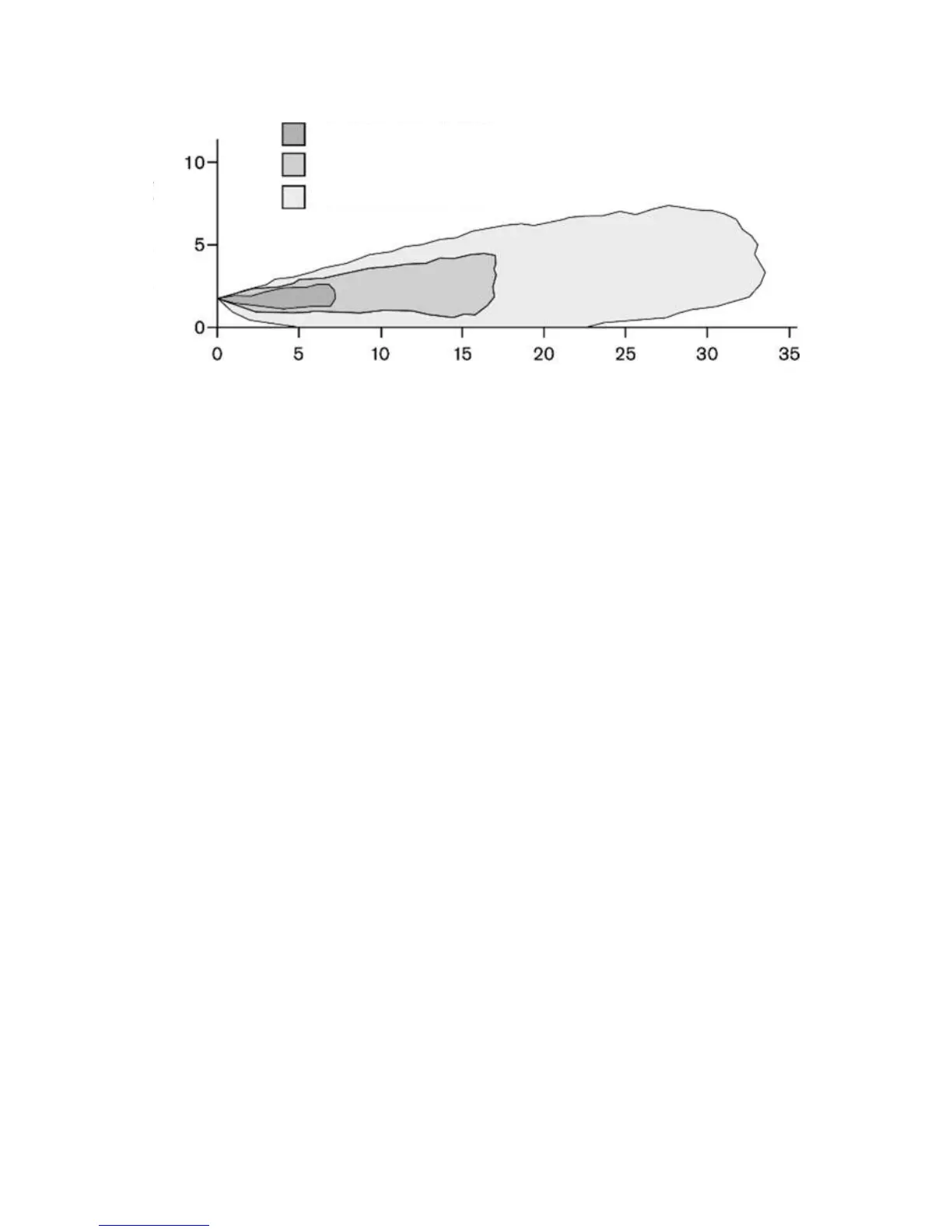
1.2.1.2 Vertical Detection Area
1.2.2 Factors Influencing the Detection of Objects
Brigade Backsense
®
shares in principle the advantages and limitations of all radar-based
systems when compared to other sensing technologies. In general, it can reliably detect most
objects in most environmental conditions such as dirt, dust, rain, snow, sun, fog, darkness,
acoustic noise, mechanical vibration, electromagnetic noise or similar.
However, there are some occasions when an object could stay undetected. Radar works on
the principle of line of sight and relies on some of the electromagnetic energy transmitted by
the sensor being reflected back from the object to the sensor. If an object does not reflect
enough electromagnetic energy back to the sensor it will not be detected.
In the case where there are multiple objects in the detection area at various distances and/or
angles, the sensor will detect up to 8 of the closest objects (based on radius), which are the
most important for collision avoidance.
The object properties, location and direction are key influences in determining if an object is
detected or not. The influencing factors are listed below.
• Size: Larger surfaces are detected better than smaller surfaces. If there are small and large
objects in the detection area, the smaller object might only register in Detection Zones closer
to the sensor.
• Material: Metal is detected better than non-metal materials, e.g. wood, plastic.
• Surface: A smooth and solid surface is detected better than rough, uneven, porous,
fragmented or liquid surfaces, e.g. bushes, brick work, gravel, water.
• Shape: A flat object is better detected than a complex shape. Variation in relative location
and direction can influence detection significantly.
• Angle: An object facing directly towards the sensor (perpendicular, orientation head on to
the sensor) is detected better than an object that is located towards the edges of the
detection area or at an angle.
• Distance: An object closer to the sensor is better detected than one that it is further away.
• Relative speed to sensor: Detection is better if there is a relative speed between object
and sensor.
• Ground condition: Objects on flat, mineral material ground are better detected than on
rough or metal surfaces.
• Environmental conditions: Dense dust or very strong rain or snowfall will reduce the
detection capability.
Person
Car