7
3 Object Detection
3.1 Separate Object Detection
Each Backsense
®
BS-9000 sensor is capable of detecting and reporting data for up to 8
objects within the limitations detailed in section 1.2. In the event that there are more than 8
objects within the detection area of a particular sensor, only the closest 8 detections will be
reported, (based on object radius from sensor)
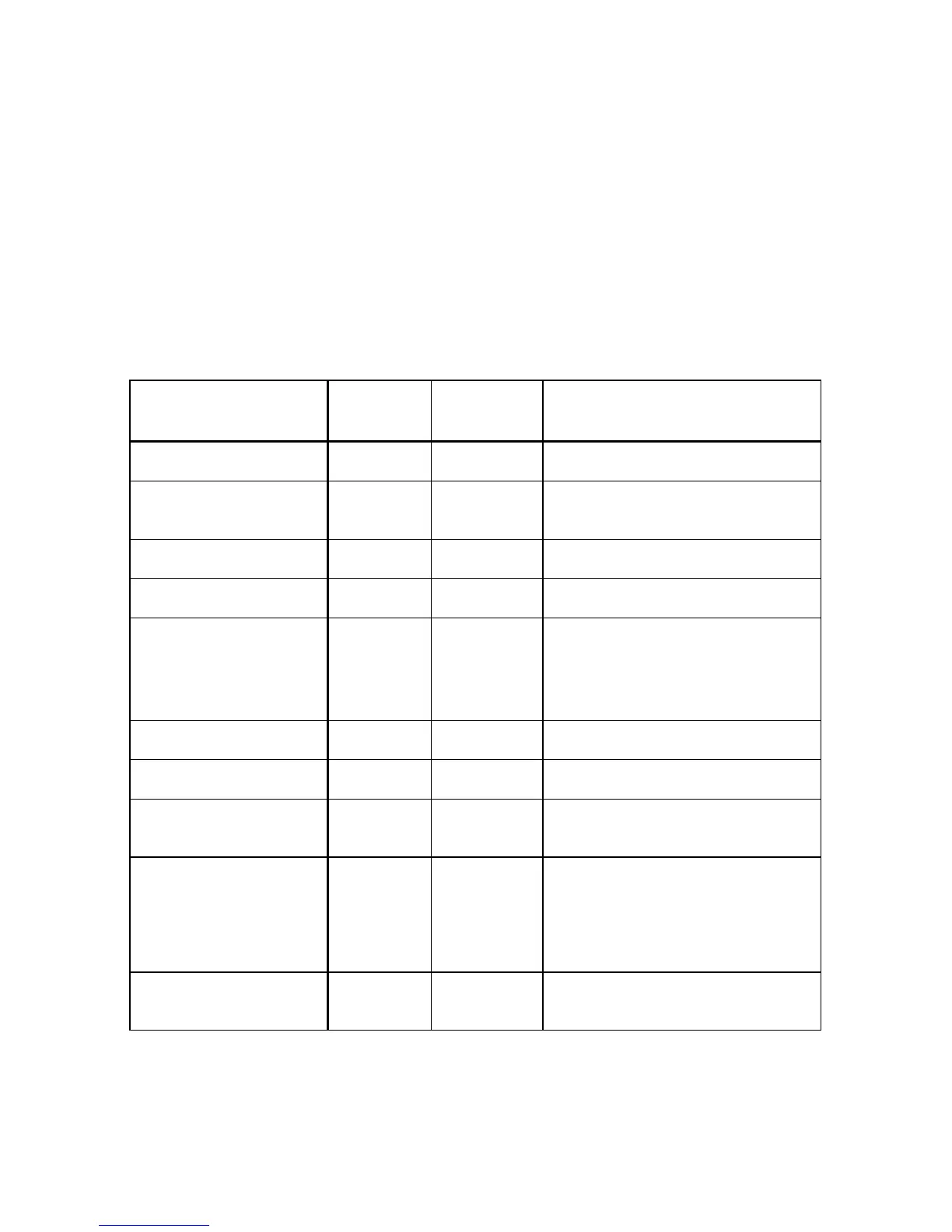
3.2 Detected Object Data
The BS-9000 will transmit data for each detected object in separate CAN messages. The
following detection data will be reported:
Data Definition
Minimum
Value
Maximum
Value
Description
Line of sight distance between
object and sensor front face
(Right)
Angle between object and sensor
front face. Position perpendicular
to the senor represents 0
Object distance forward from front
Object distance left or right of
Speed difference between sensor
and object. Negative value
indicates object approaching the
sensor. Positive value indicates
object leaving the sensor.
Power of reflected radar signal
Object identity. 0 represents
Logic ‘1’ indicates detection of
new object. Logic ‘0’ indicates
detection of existing object.
Similar to CANOpen requirements;
this parameter identifies the
reason for message transmission.
0 = Keep Alive, 1 = object
detection, 2 = future use, 3 =
Logic ‘0’ indicates object
detection. Logic ‘1’ indicates no
Further technical details of detection data are available in section 5.7.