Chapter 8 ParametersASDA-A2R Series
8-82 Revision December, 2014
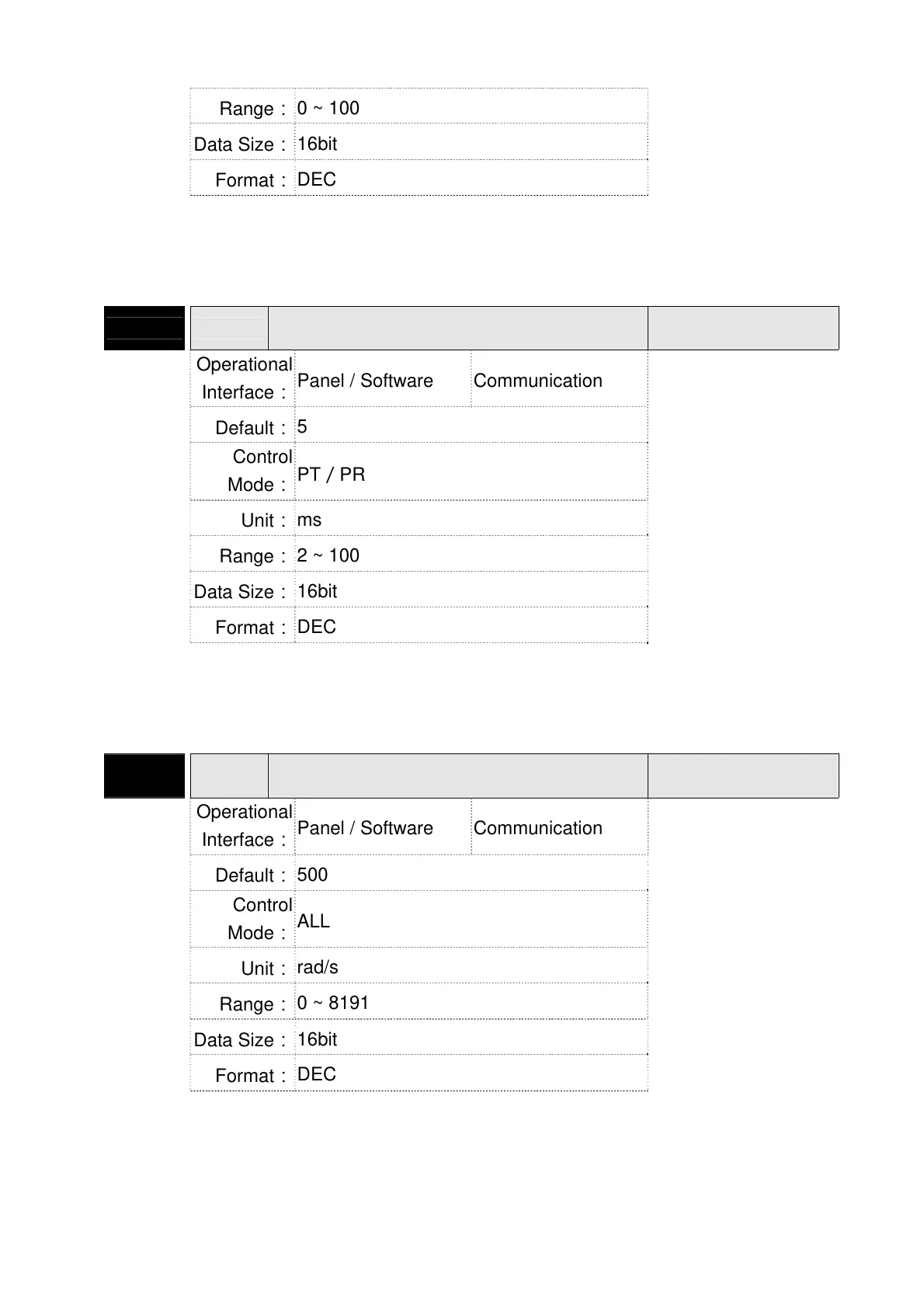
Range:
0 ~ 100
Data Size:
16bit
Format:
DEC
Settings:
If the position command is changed smoothly, increasing the gain
value can reduce the position error.
If the position command is not changed smoothly, decreasing the
gain value can tackle the problem of mechanical vibration.
P2-03 PFF
Smooth Constant of Position Feed
Forward Gain
Address: 0206H
0207H
Operational
Interface:
Panel / Software Communication
Related Section: -
Default:
5
Control
Mode:
PT/PR
Unit:
ms
Range:
2 ~ 100
Data Size:
16bit
Format:
DEC
Settings:
If the position command is changed smoothly, decreasing the
value can reduce the position error. If the position command is not
changed smoothly, increasing the value can tackle the problem of
mechanical vibration.
P2-04 KVP Speed Loop Gain
Address: 0208H
0209H
Operational
Interface:
Panel / Software Communication
Related Section:
6.3.6
Default:
500
Control
Mode:
ALL
Unit:
rad/s
Range:
0 ~ 8191
Data Size:
16bit
Format:
DEC
Settings:
Increase the value of speed loop gain can enhance the speed
response. However, if the value is set too big, it would easily
cause resonance and noise.

 Loading...
Loading...