Chapter 8 ParametersASDA-A2R Series
Revision December, 2014
8-197
Command code
000Dh
Calculate the error between E-Cam and indexing
coordinates for PR positioning.
General
Parameters
N/A
Macro Parameters P5-93.Low_Word = DCBA: UZYX (8 digits, HEX)
YX (PR number) = 0~0x3F (it is invalid when the value
is set to 0)
UZ: The value has to be set to 0.
BA (Function of P5-95):
0 (Use avoid point),
1 (Use available forward rate, V1.038 sub53)
DC (Inhibit reverse rotation):
0 (invalid),
1(Inhibit reverse rotation, V1.038 sub53)
P5-95: Avoid point (cannot pass this point) = 0 ~ 100
(%) of E-Cam cycle or available forward rate 0 ~ 100
(%)
Monitor variable 091(5Bh): It displays the current indexing coordinate
position (PUU)
When E-Cam is engaged, and the motor is stopped because of Servo Off or
alarm occurs, it would cause position error between the actual position and
E-Cam position. After re-servo On, this macro command can be used to
calculate the correction value and write the value into the specified PR for
incremental positioning. So that the motor can return to the ideal E-Cam
position.
When using this macro command:
1. P5-88.X1 = 1 to make E-Cam keep engaging when servo Off and
continue to calculate E-Cam position.
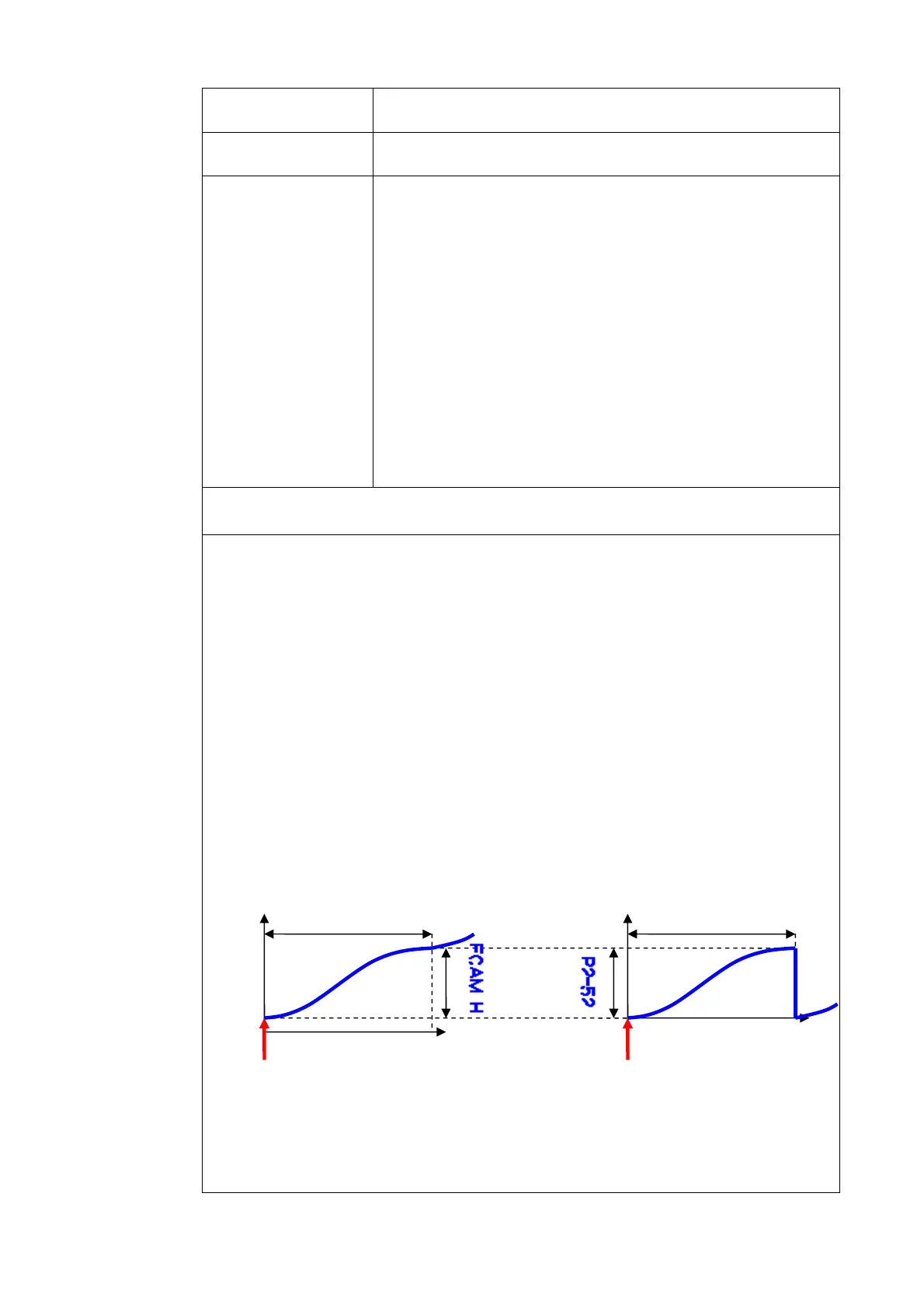
2. The hight of
indexing coordinate and E-Cam coordinate should be the same: P2-52=
ECAM_H (The moving distance when E-cam operates one cycle)
3. E-Cam table scaling (P5-19) must be 1.0 time
4. When E-Cam is engaged for the first time, 0 degree of E-cam should
aim at 0 degree of indexing coordinate.
Note 1: ECAM_H (height of E-Cam table) = E-Cam table (last point - first poinst)
Note 2: Indexing coordinate = (absolute coordinates/P2-52) take remainder.
Note 3: Use PR command for incremental positioning control.
0°
E-Cam table
360°
A cycle of E-Cam A cycle of indexing
Indexing coordinates
Slave
Axis
Position
(Y)
0°

 Loading...
Loading...