Chapter 8 Parameters ASDA-A2
8-128 Revision February, 2017
operated as incremental motor.
1: Absolute mode. (This setting is only available for the servo motor
with absolute encoder. When an incremental servo motor is
connected, AL069 will occur.)
Y: Setup the pulse command when absolute position is lost
0: When AL060 or AL06A occurs, it cannot accept pulse command
1: When AL060 or AL06A occurs, it can accept pulse command
Z: Function setting when index coordinates overflow
0: Index coordinates is lost when overflows
1: Index coordinates will not overflow, but absolute coordinates will not
remain
U: Reserved
NOTE
This parameter is effective only after the servo drive is re-powered on.
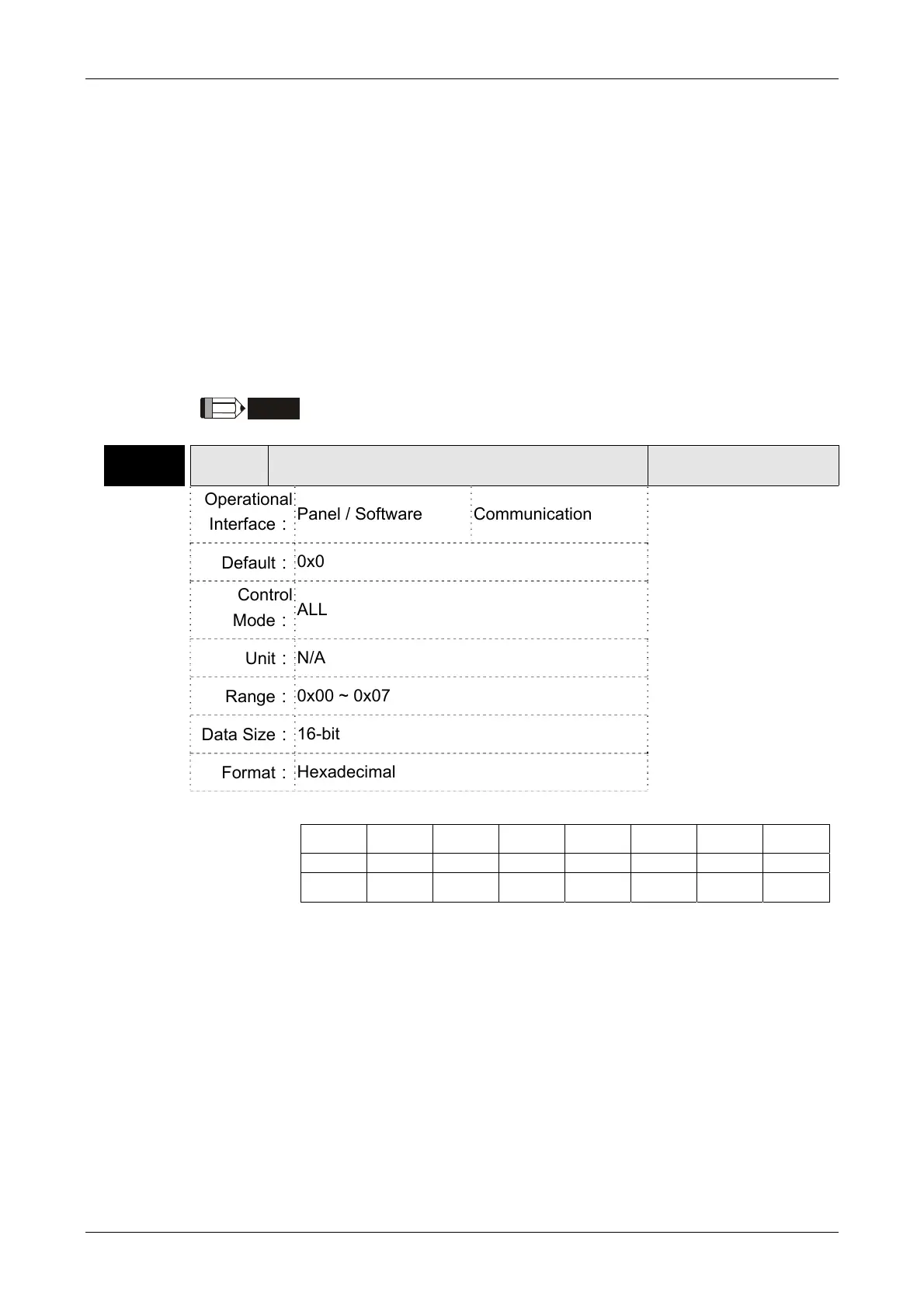
P2-70 MRS Read Data Format Selection
Address: 028CH
028DH
Operational
Interface:
Panel / Software Communication
Related Section: N/A
Default:
0x0
Control
Mode:
ALL
Unit:
N/A
Range:
0x00 ~ 0x07
Data Size:
16-bit
Format:
Hexadecimal
Settings:
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
Bit15 Bit14 Bit13 Bit12 Bit11 Bit10 Bit9 Bit8
Bit 0: Data unit setting of digital input/output (DI/DO);
1: Pulse, 0: PUU
Bit 1: Communication data unit setting; 1: Pulse, 0: PUU
Bit 2: Overflow warning; 1: No overflow warning, 0: Overflow warning,
AL.289 (PUU), AL.062 (pulse).
Bit 3 ~ Bit15: Reserved. Must be set to 0
.
 Loading...
Loading...





