Tel/Fax: 0755-82734836 www.dh-robotics.com
22
3 I/O Control
The I/O mode is a common control method in industry.
The grippers will monitor the pin states of Input 1 and Input 2 (0V and high resistance states).
For these two pins, there will be four logic states:00,01,10,11. You can control this gripper through
changing the states of Input 1 and Input 2. As shown in Table 3.1. The specific configuration is shown
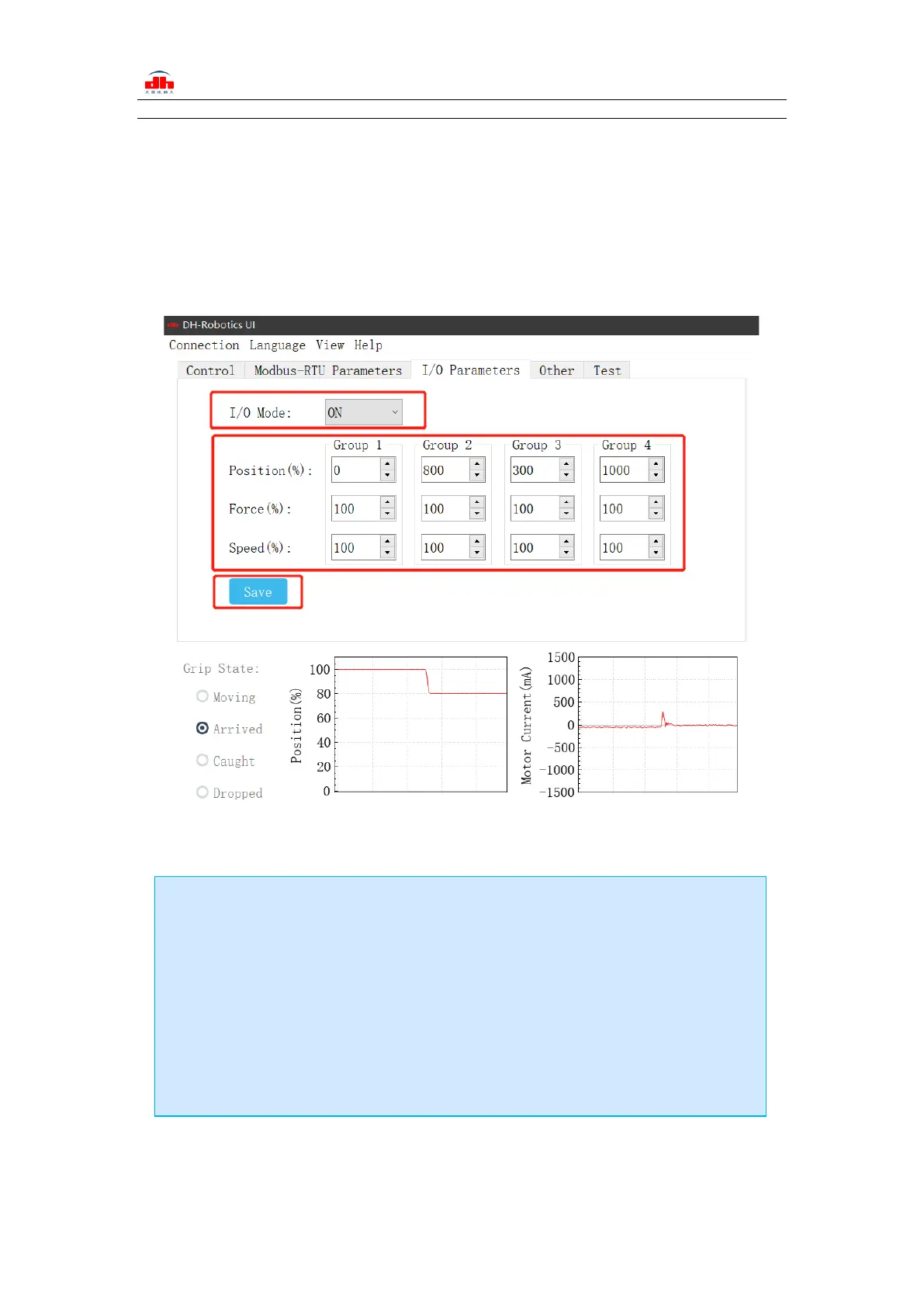
in the figure below:
Figure 3.1 I/O mode
Steps to switch IO mode
·① Open IO mode: open IO mode first.
·② Configure four groups of IO parameters: set the four groups of parameters of
gripper, including position, force and speed.
·③ Save: click the Save button to write the parameters to the internal register of flash,
and restart to control.
·④ Restart: after the restart, the switch to IO mode is successful. You can control the
gripper according to the input signal, and the running status will be fed back through
output.