Quick Start
Commissioning
42 Digistart IS User Guide
www.controltechniques.com Issue: 4
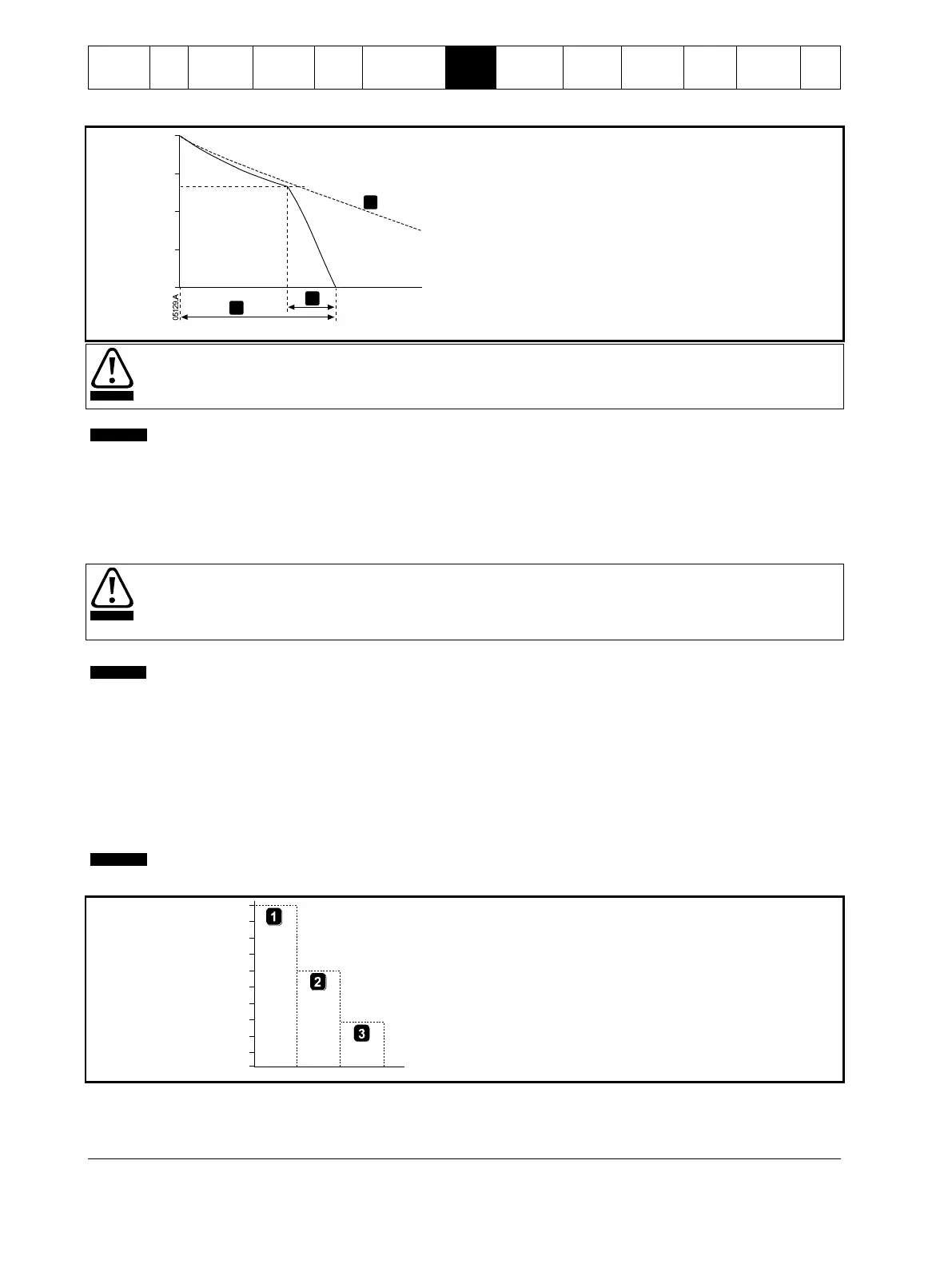
Figure 7-7 DC brake stop
1: Stop time (Pr 2I)
2: Brake time (Pr 2N)
3: Coast to stop time
When using DC brake, the mains supply must be connected to the soft starter (input terminals L1, L2, L3) in positive
phase sequence and Pr 5D Phase Sequence must be set to Positive only.
For loads which may vary between braking cycles, install a zero speed sensor to ensure that the soft starter ends DC
braking when the motor stops. This avoids unnecessary heating of the motor.
For more information on using the Digistart IS with an external speed sensor (e.g. for applications with variable load
during the braking cycle), see DC Brake with External Zero Speed Sensor.
7.4 Jog operation
Jog runs the motor at reduced speed, to allow alignment of the load or to assist servicing. The motor can be jogged in either forward
or reverse direction.
Slow speed running is not intended for continuous operation due to reduced motor cooling.
Jog operation causes the motor to heat faster than the rate calculated by the motor thermal model. If you are using jog,
install a motor thermistor or allow sufficient restart delay (Pr 6G)
Soft start and soft stop are not available during jog operation.
Jog is only available for the primary motor. For more information on primary and secondary motor sets, see Secondary
motor set on page 62.
Jog works by effectively changing the frequency and voltage applied to the motor. This is achieved by controlling several positive
halves of the output voltage waveform while ignoring the negative halves of the waveform. This is followed by controlling several
negative halves of the output voltage waveform while ignoring the positive halves of the waveform. The motor will notice a reduced
voltage at approximately 10% of the nominal mains supply frequency.
Jog in reverse direction is achieved by effectively transposing phases L2 and L3 on the output of the soft starter. The motor notices
an apparent phase reversal and changes the rotational direction. The torque produced when the motor is jogged in reverse direction
is less than that produced in forward direction. To set the jog torque level, use Pr 15E.
Setting Pr 15E above 50% may cause increased shaft vibration.
Figure 7-8 Jog operation
0%
100%
90%
80%
20%
40%
10%
30%
50%
60%
70%
05723.D
1. Motor FLT
2. Jog forward maximum torque
3. Jog reverse maximum torque
To activate jog operation, use either a programmable input (see Pr 3A and 3F, will operate only in Remote Mode) or a shortcut key
(Pr 9J and 9K).
 Loading...
Loading...







