PID Function Block
March 2006
5-93
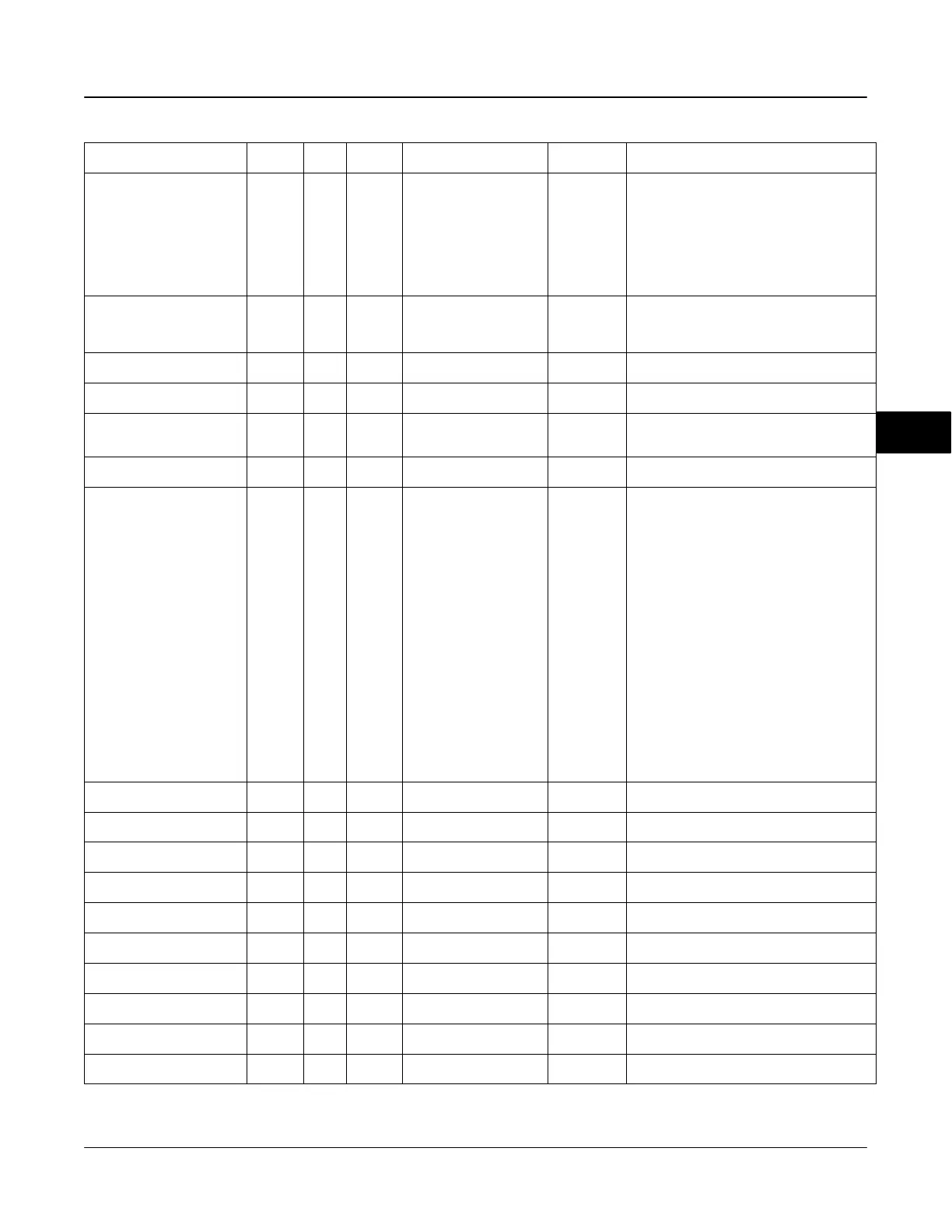
Table 5-31. PID Function Block System Parameters Definitions (Continued)
Label
PARAMETER_NAME
DescriptionInitial ValueRange
Block
Mode
RO /
RW
Index
Number
UBeta
BETA (ubeta)
73 OOS > = 0, < = 1 1.0
Data Type: Float
Fraction of proportional action taken on error
versus PV. For a value of 0.6, then 60% of the
proportional action will be based on error and
40% on PV. The value of BETA may be changed
over a range of 0−1 if STRUCTURE is set to Two
Degrees of Freedom Control. Otherwise, it is
automatically set to a value of 1 or 0 based on
the Structure selection.
IDeadBand
IDEADBAND
74 OOS Positive 0
Data Type: Float
Integral action stops when ERROR is within
IDEADBAND, proportional and derivative action
continue. EU of PV_SCALE
StdDev
STDDEV
75 RO N/A Dynamic
Data Type: Float
Standard deviation of PV.
Cap StdDev
CAP_STDDEV
76 RO N/A Dynamic
Data Type: Float
Standard deviation of PV changes.
T Request
T_REQUEST
77 RO ALL
0=Request Tuning
1=Force Tuning
2=Reset Tuner
0
Data Type: Bit String
Operator request to initiate/control autotuning.
T State
T_STATE
78 RO NONE 0
Data Type: Unsigned8
Current autotuner state.
T Status
T_STATUS
79 RO N/A
0=Scan Rate Too Low
Warning
1=Insufficient Process
Response (obsolete)
2=Scan Rate Too High
Warning
3=Inverse Direct Acting
Error
4=PV Deviation Too Large
5=Initial PV Deviation Too
Large
6=PV Limited or Constant
7=PV Bad
8=Invalid Mode for Tuning
9=BKCAL_IN Non Good or
Limited
10=Out Limited
11=Bypass Active
12=Mode Changed
13=Tracking Active
14=Disconnected
15=SP Changed
0
Data Type: Bit String
Autotuner status.
T Ipgain
T_IPGAIN
80 RO N/A 0.0
Data Type: Float
Integrated process gain.
T Ugain
T_UGAIN
81 RO N/A 0.0
Data Type: Float
Ultimate gain.
T Uperiod
T_UPERIOD
82 RO N/A 0.0
Data Type: Float
Ultimate period.
T Psgain
T_PSGAIN
83 RO N/A 0.0
Data Type: Float
Process static gain.
T Ptimec
T_PTIMEC
84 RO N/A 0.0
Data Type: Float
Process time constant.
T Pdtime
T_PDTIME
85 RO N/A 0.0
Data Type: Float
Process dead time.
T Targetop
T_TARGETOP
86 ALL 2
Data Type: Unsigned8
Target oscillation periods.
T Hyster
T_HYSTER
87 ALL > = 0.0 0.0
Data Type: Float
Hysteresis
T Relayss
T_RELAYSS
88 ALL > = 0.0 3.0
Data Type: Float
Relay step size.
T Gain Magnifier
T_GAIN_MAGNIFIER
89 ALL > 0.1, < 100 1.0
Data Type: Float
Scales amount of gain.
−Continued−
5
 Loading...
Loading...







