E10 Operation Manual V1.15
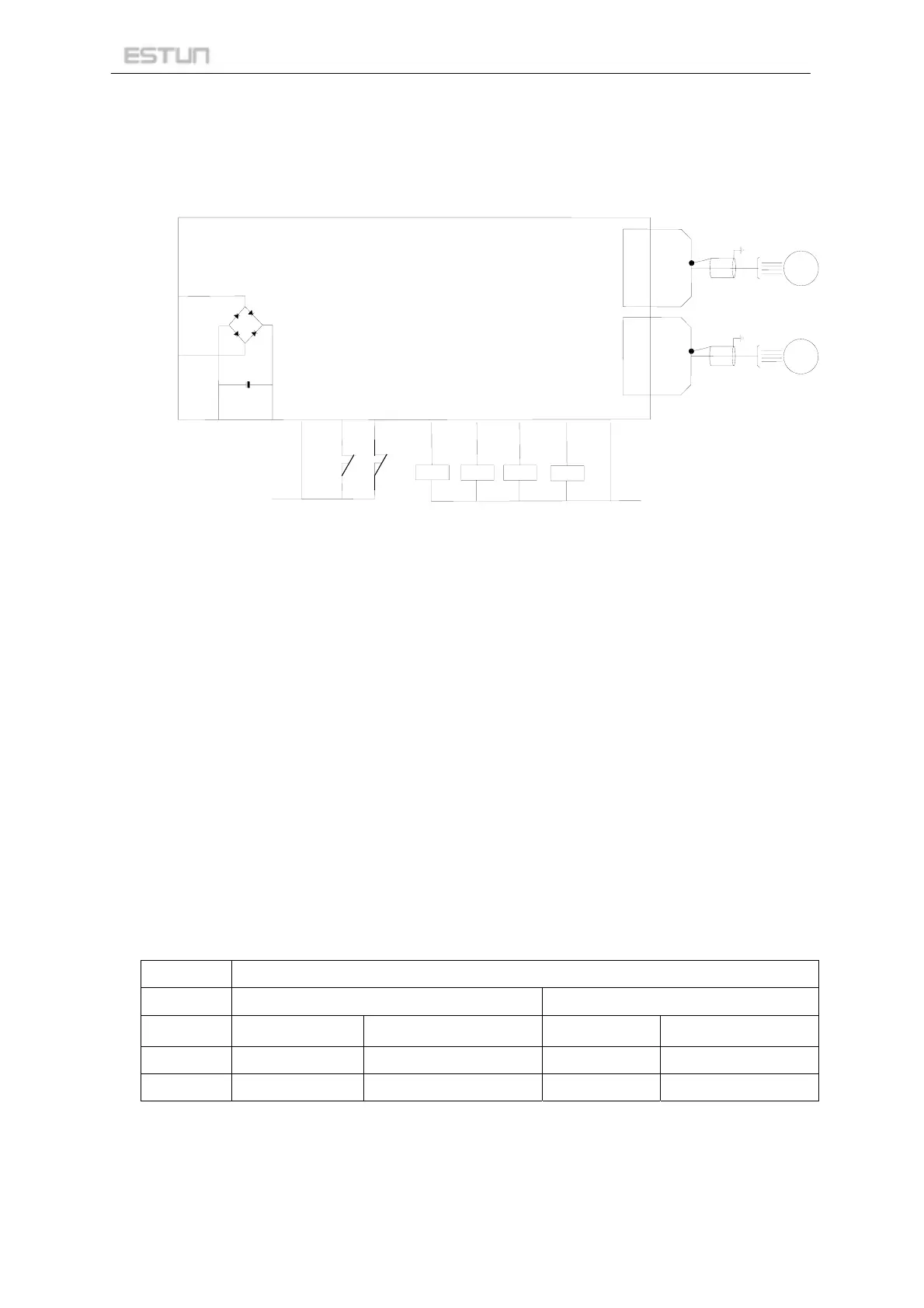
3.7 E10 electrical design typical application example
0V
E
E
10
OUT3
11
OUT4
OUT2
9
E10
1
2
67
8
5
3
4
AC1
AC2
IN1
IN2
OUT1
GND +24V
0V
12
24V
+24V
ENCODER
ENCODER
Electrical Design Description:
The input access method:
1, has to find a reference point function:
Shearing machine : input IN1 (normally open signal) as the shear count signal input, then input IN2
accesses reference point.
Bending machine: input IN1 and IN2 access the reference point.
2, there is no function to find a reference point:
1, has soft-limit function:
Shearing machine : input IN1 (normally open signal) as the shear count signal input, an external
relay. IN2 may not access.
Bending machine: input IN1, and IN2 not access.
2, there is no soft limit function:
Shearing machine: input IN1 (normally open signal) as the shear count signal input, an external
relay. Input IN2 as a time relay input.
Bending machine: with the Shearing machine, input IN1, IN2 (normally closed) as a time relay
input, the signal mode is optional.
Note: input IN1 (normally open signal) as a count signal input, an external relay. Input IN1, IN2 (normally
closed) as a time relay input, the signal trigger method is optional (see parameter description 'input level
mode').
Detailed in the table below:
Signal Function
Bending Machine Shearing Machine
0 1 0 1
Input 1 Top point X search ref-point Top point
Input 2 Switch point Y search ref-point Switch point X search ref-point
Output access methods:
When E10 has soft limit function:
Shearing machine : the output OUT1 and OUT2 access relay coil externally.
Page 8 of 28