www.fastech.co.kr
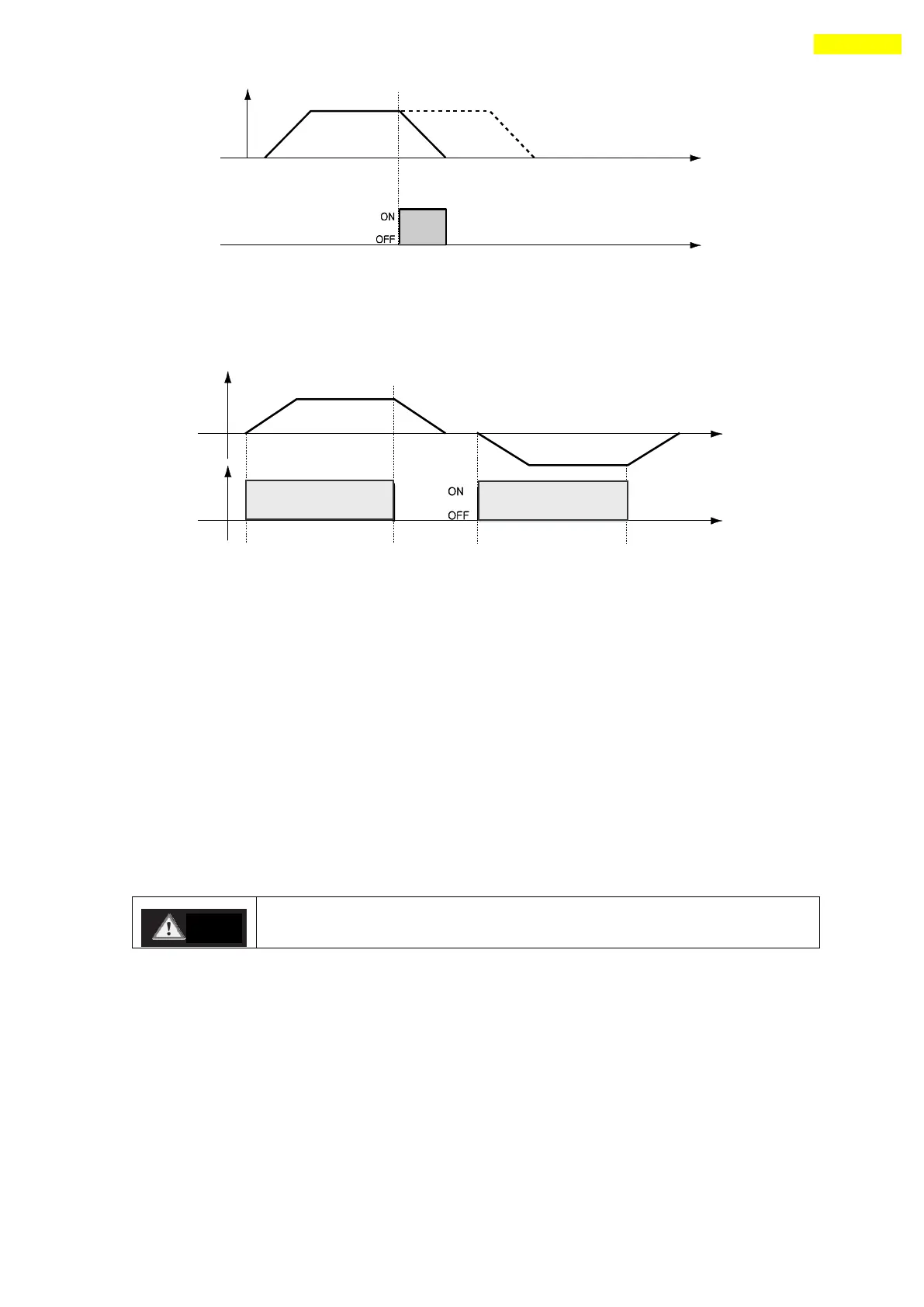
6) ‘Jog+’ and ‘Jog-‘Input
When Jog+ or Jog- signal is ON, the motor rotates clockwise or counterclockwise until it
reaches the hardware limit or the software limit. Jog motion pattern is subject to jog
related parameters (No.7: start speed, No.6: speed, No.8: Acc Dec time).
7) ‘Servo ON’ and ‘AlarmReset’Input
When the protective function of drive executes, alarm output is released. When
AlarmReset input is set to ON, alarm output and alarm blink output are released. Before
releasing alarm output, the user must remove any cause of alarm operating.
When Servo ON/OFF signal is set to OFF, the drive stops supplying the current to the
motor and so the user can directly adjust the output position. When Servo ON/OFF signal
is set to ON, the drive restarts to supply the current to the motor and its torque is
recovered. Before operating the motor, the user must set it to ON.
When the drive is set to Servo ON, CN1 connector’s ServoReady output signal is
set to ON. Servo ON signal is edge trigger type and pulse scale is 10ms or more.
If the ‘Servo ON’ signal is assigned to input pin, ServoON command
from GUI or DLL library will not executed.
 Loading...
Loading...
