www.fastech.co.kr
*1. If ‘No.0: Pulse per Revolution’ in the parameter list is changed, the motor is set
to Servo OFF.
*2. After ‘ServoON’ signal is assigned to input pin, it is impossible to use
‘SERVO ON’ button in UserProgram(GUI).
*3. After ‘ServoON’ is executed, the ‘Command Position’value will change as
same as ‘Actual Position’value to remove ‘Position Error’.
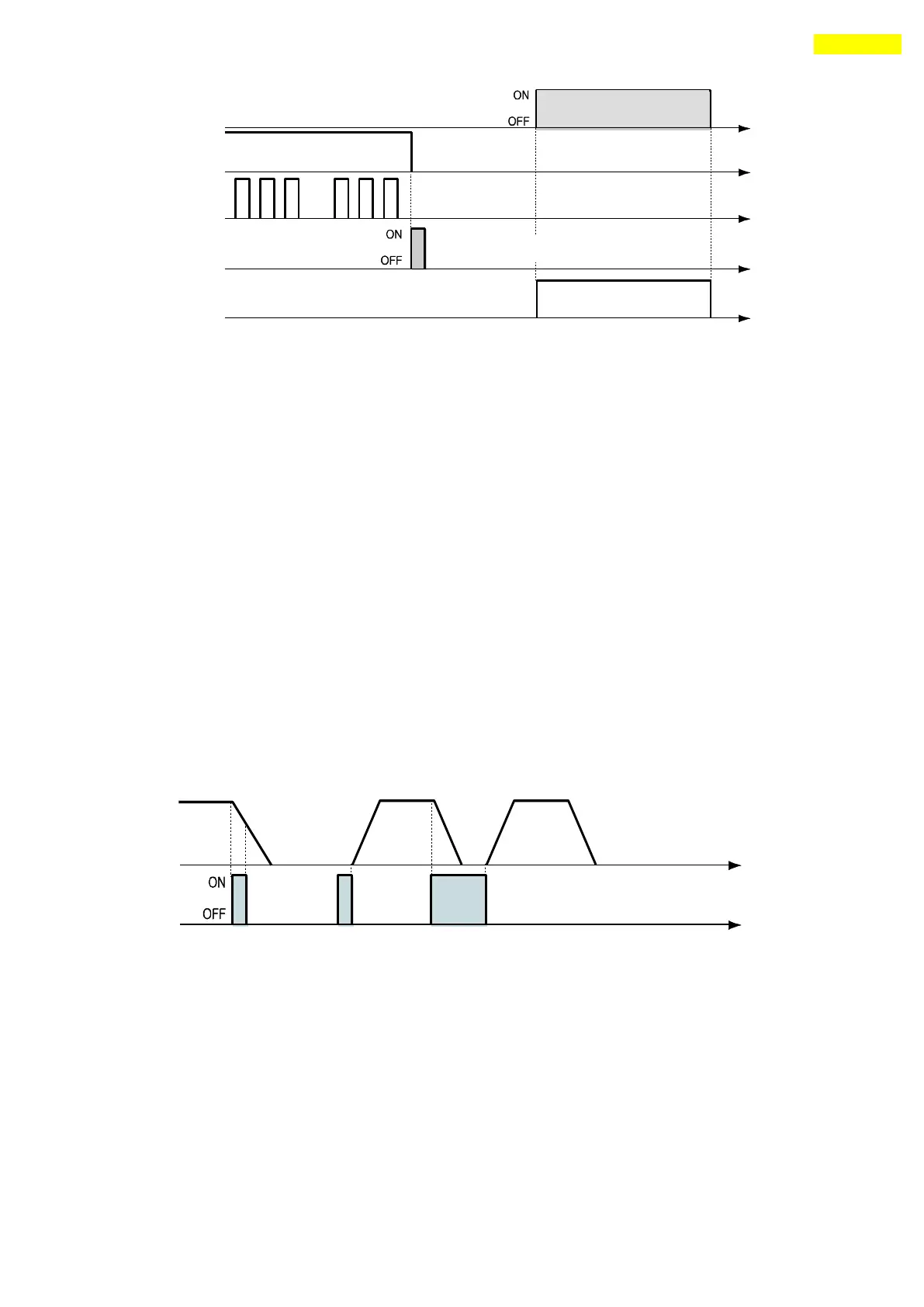
8) ‘Pause’Input
When Pause signal is set to ON, the motion in service is stopped. There are two pause
signal operation modes as follows.
① Case A : When Pause signal is set to ON, the motor starts to decelerate. Pause
signal becomes OFF before the motor is completely stopped. To start motion, Pause
signal should be set to ON.
② Case B : When Pause signal is set to ON, the motor starts to decelerate. The signal
is continuously maintained since the motor is completely stopped. To start motion,
Pause signal should be set to OFF.
Pause signal pulse scale is 10ms or more.
*1. This function is not applied while ‘Repeat Test’ of the User Program(GUI) is
executing.
*2. This function is not applied while ‘Push Motion’ positioning.
9) ‘Origin Search’Input
When ‘Origin Search’ signal is set to ON (10ms or more), it starts to search the
origin position according to selected conditions. The conditions are subject to
parameters such as No.20:Org Method, No.17:Org Speed, No.18:Org Search Speed, No.19:Org
AccDec Time, No.21:Org Dir. (For more information, refer to ‘15.Parameter’.) When the
 Loading...
Loading...
