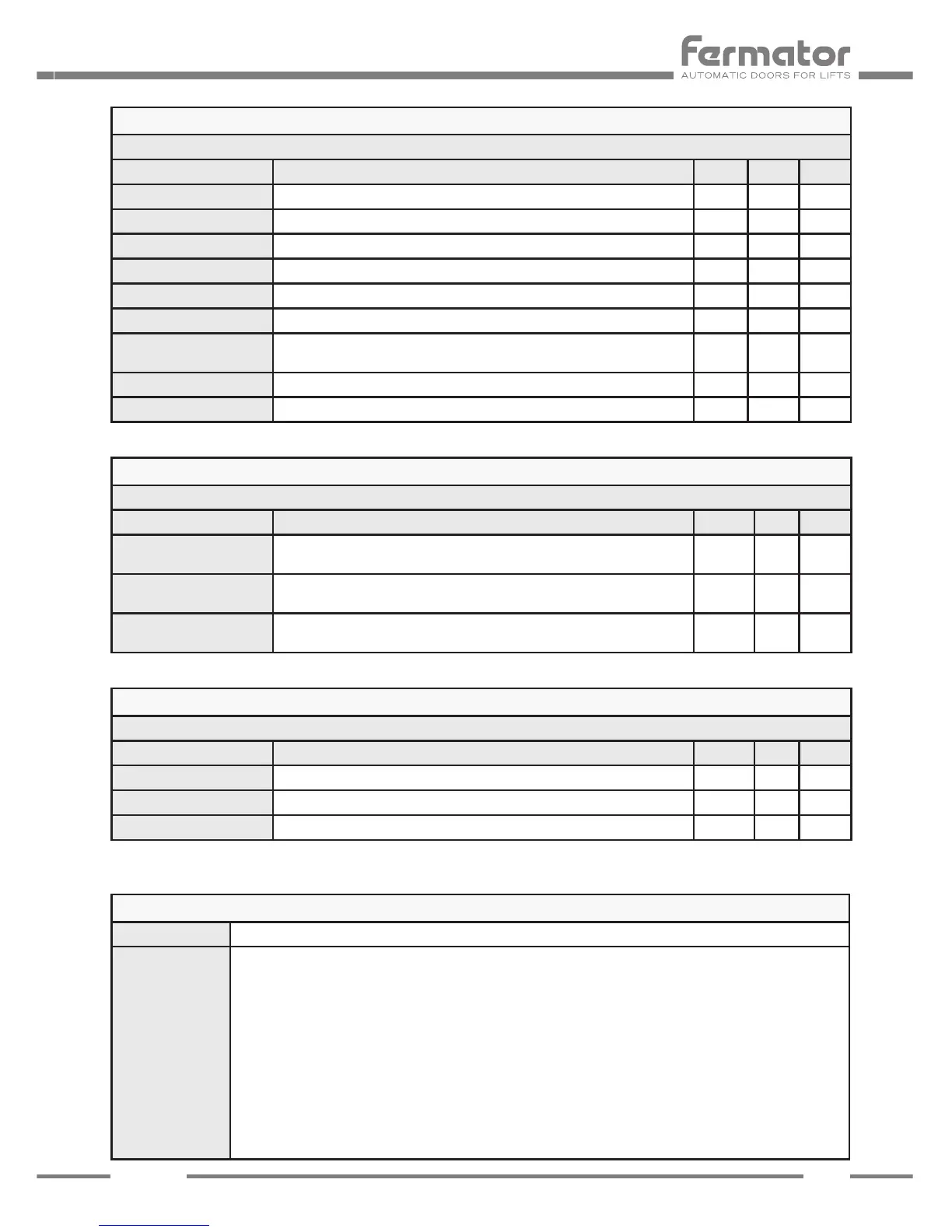
PROGRAMMING MENU
Program Parameters
Parameters torques
Parameter Description Units Min Max
Max open torque Maximum torque in the opening movement. (Value 0 is disabled the limit
torque).
(N·m) 1 4.0
Max close torque Maximum torque in the closing movement. (Value 0 is disabled the limit
torque).
(N·m) 0.5 3.0
Hold torque Torque applied to maintain the door stopped in any position of the clear
opening.
(N·m) 0.5 1.5
Program Parameters
Parameters times
Parameter Description Units Min Max
Eco Delay Programmable time delay (Eco mode option). (s) 1 60
Backstep delay Programmable time delay (Obstruction Backstep option). (s) 0 60
Time standby Hold Programmable time during the hold voltage is applied. (s) 0 1.800
Program Parameters
Parameters lengths
Parameter Description Units Min Max
Open Length Door clear opening + Clutch length. (m) 0.100 5.000
Open Initial Length The space at the initial opening movement. (m) 0.001 0.100
Close Initial Length The space at the initial closing movement. (m) 0.001 0.100
Open Proximity Length The space at the nal opening movement. (m) 0.001 0.040
Close Proximity Length The space at the nal closing movement. (m) 0.001 0.040
Clutch Length The required space to open / close the Clutch. (m) 0.000 0.100
Additional Clutch
Movement
Additional clutch movement to personalize the opening distance in
emergency mode.
(m) 0 0.2
Pinion Perimeter Perimeter of the motor pinion. (m) 0.001 1.000
Backstep length Length of the backwards movement (Obstruction Backstep option). (m) 0.010 0.150
Program Control
Test Makes a door open or close cycle to verify proper operation.
Door Learning Makes a Door Learning process to set up the door.
Before doing a Door Learning a Motor Calibrations has to be done.
The door will do a close movement and then will do two complete movements to detect the clear opening. From
the information obtained the microprocessor will calculate the acceleration and deceleration ramps to give the
optimum control of the doors. Once the autoadjustment has been completed the parameters are stored in non
volatile EEPROM. The autoadjustment process sets all parameters to the factory value if these are not protected.
Autoadjustment process:
1. The door will close completely in slow speed until the end to detect the 0 position.
2. The door will open slowly counting the clear opening until it reach the open mechanical stop.
3. The door will close after a short delay. From the information obtained the microprocessor will calculate the
acceleration and deceleration ramps and to give the optimum control of the doors.