65
)XQFWLRQVRI/LQNDJH0HQX!
H
HF
Q
W
P
nd return to the L
nka
e
menu by touchin
th
TN
tt
n
ensorTouc
™>
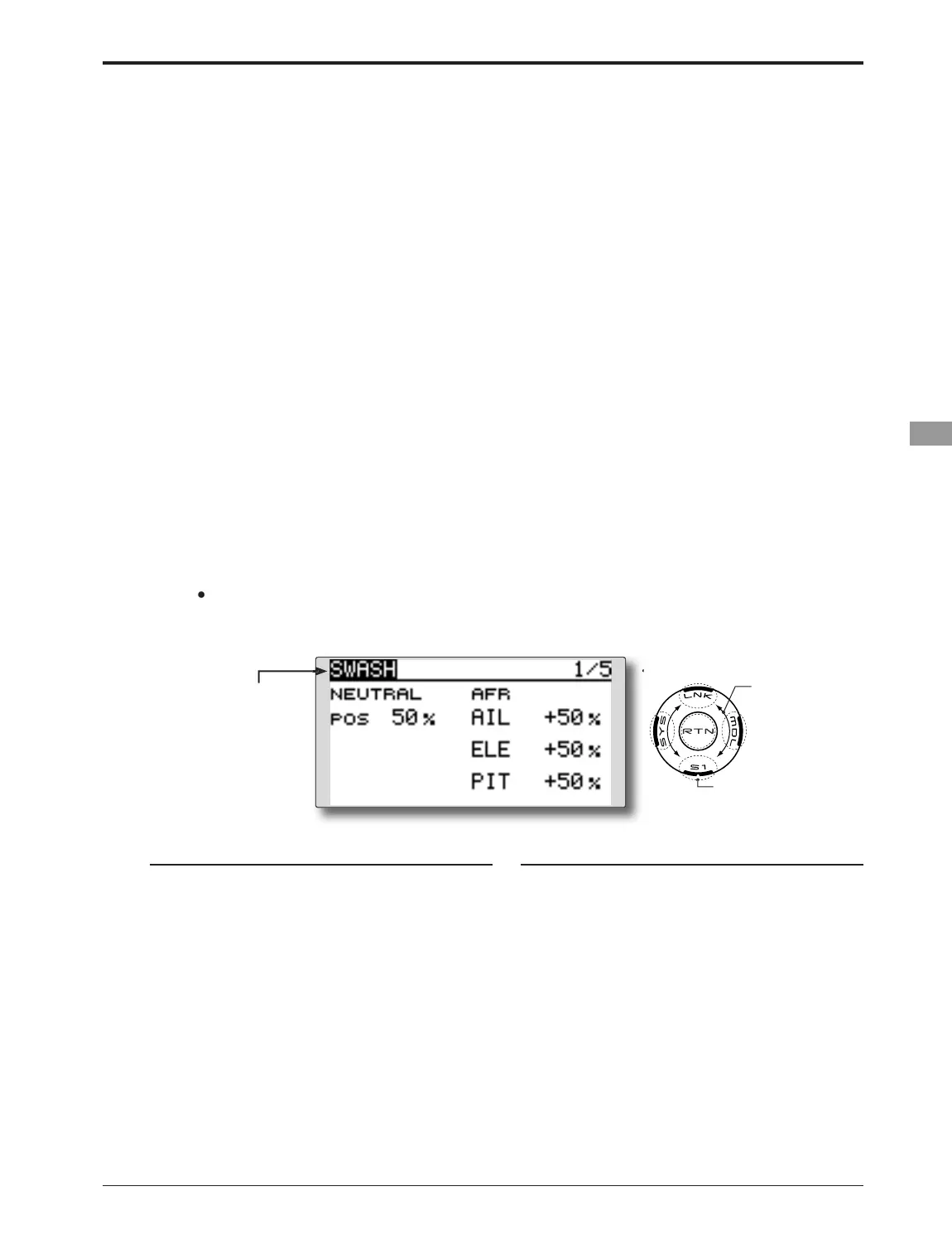
SWASH
Swash AFR and linka
e correction function.
helicopter only, except
swash type H-1
HXWUDO3RLQW
$W\RXU
Q
DJHV
IW
HVHUYR
RUQ
HY
DWHVIURP
SHUSHQ
FX
DUSRV
W
RQDWQHXWUD
W
H
Q
D
H
ompensation functions in this menu may not
ompensate effect
ve
y. To correct t
s use t
e
1HXWUD
3R
QWIXQFW
RQ7
VZ
PRYHW
HQHXWUD
oint of the servos to the actual
er
endicula
SRV
W
RQ+RZHYHUW
VD
XVWPHQWF
DQJHVRQ
\
t
e ax
s po
nt of t
e compensat
on funct
ons
n t
s
HQXDQGGRHVQRWDIIHFWWKHQHXWUDO
RVLWLRQR
t
r f
n
t
n
ZDVK$)5
6ZDVK$)5IXQFWLRQUHGXFHV
LQFUHDVHV
RU
HYHUVHVW
HUDWH
WUDYH
RIW
HD
HURQH
HYDWRUDQ
ROOHFWLYHSLWFKIXQFWLRQVE
DG
XVWLQ
RUUHYHUVLQ
WKHPRWLRQRIDOOVHUYRVLQYROYHGLQWKDWIXQFWLRQ
Q
\Z
HQXV
QJW
DWIXQFW
RQ
HXWUDOSR
QWVHWW
QJSURFHGXU
he neutral
oint becomes the correction
tandard
oint.
$G
XVWLQ
WKHVHUYRKRUQVRWKDWWKHQHXWUDOSRLQWLVQHDUWKH
50% position makes the mixin
amount small.
1. Neutral point settin
Move the cursor to the
POS
item and hold
he
itch o
eration so that the servo horn is
t a r
ht an
le to the l
nka
e rod and Touch
he RTN button
or one second. Th
s value
nd
cates the servo's neutral pos
t
on
ter read
ng the neutral po
nt, use the
ther correct
on
unct
ons to make
urthe
d
ustments.
L[LQ
5DWH
VP
[
QJ
VXVH
WRFRPSHQVDWHW
HVZDV
p
ate as necessar
ur
n
spec
f
c contro
nputs.
7KHIROORZLQJFRPSHQVDWLRQPL[LQJLVSRVVLEOH
,7WR
,/
3,7WR(/(
,/WR3,7
(/(WR
,/
Q
(/(WR3,7
+5PR
H
,WD
XVWVW
HVZDV
plate to for proper operation of each control using
e correspon
ng compensat
on m
x
ng.
QND
H
RPSHQVDW
RQ
his compensation mixing is used to correct the
VZDV
S
DWHIRUS
WF
FRQWUR
DW
RZS
WF
DQ
itch.
HHG&RP
HQVDWLRQ
f
n
t
n
t
an
t
r
a
t
n t
at
is
enerated b
the difference in the movements o
DFKVHUYRZKHQWKHVZDVK
ODWHPRYHV
ZDVK$)5VHWW
QJSURFHGXUH
KHVZDVK$)5IXQFWLRQPDNHVDG
XVWPHQWVVR
WKDWWKHVHUYRVWUDYHOWKHVSHFL¿HGDPRXQWE\>$,/@
>(/(@DQ
>3,7@RSHUDW
RQ
1
Move the cursor to the function
ou want to
ad
ust and touch the RTN button to switch to
the data
nput mode
2. Ad
ust the AFR rate by scroll
ng the touch
,Q
W
D
YD
XH
$G
XVWPHQ
a
:KHQWKH571EXWWRQLVWRXFKHGIRURQHVHFRQGWKH$)5
ate is reset to the initial value
Touch the RTN button to end ad
ustment and
r
t
rn t
th
r
r m
HOHF
6:$6+
WK
/LQND
P
Q
Q
the setup screen shown below by touchin
the
RTN
tt
n
crolling
ŏ0RYLQJ
ŏ6HOHFWLQ
ŏ$GMXVWLQ
Y
7R QH[

 Loading...
Loading...










