Baserunner Controller User Manual
Rev 1.0
parameters like the motor speed constant (kV), resistance of one motor phase to
neutral (Rs), and the inductance of motor phase to neutral at the nominal
commutation frequency of the motor (Ls).
The start of the Autotune process asks for your best guess of the motor’s kV in
rpm/V, as well as the number of pole pairs in the motor. The firmware uses these
initial parameters for determining the test current frequency. If you have the
information at hand, you can input values that are close to the expected ones.
The Autotune routine will usually work fine even if your initial guess for the kV
value is off. Most ebike hub motors fall within 7-12 rpm/V and an initial guess of
10 will usually do the trick.
The effective pole pairs is a count of how many electrical cycles corresponds to
one mechanical revolution of the motor and should be set correctly. The
Baserunner needs this information to correlate it’s electrical output frequency
with the wheel speed. In a direct drive (DD) motor, it is the number of magnet
pairs in the rotor, while in a geared motor you need to multiply the magnet pairs
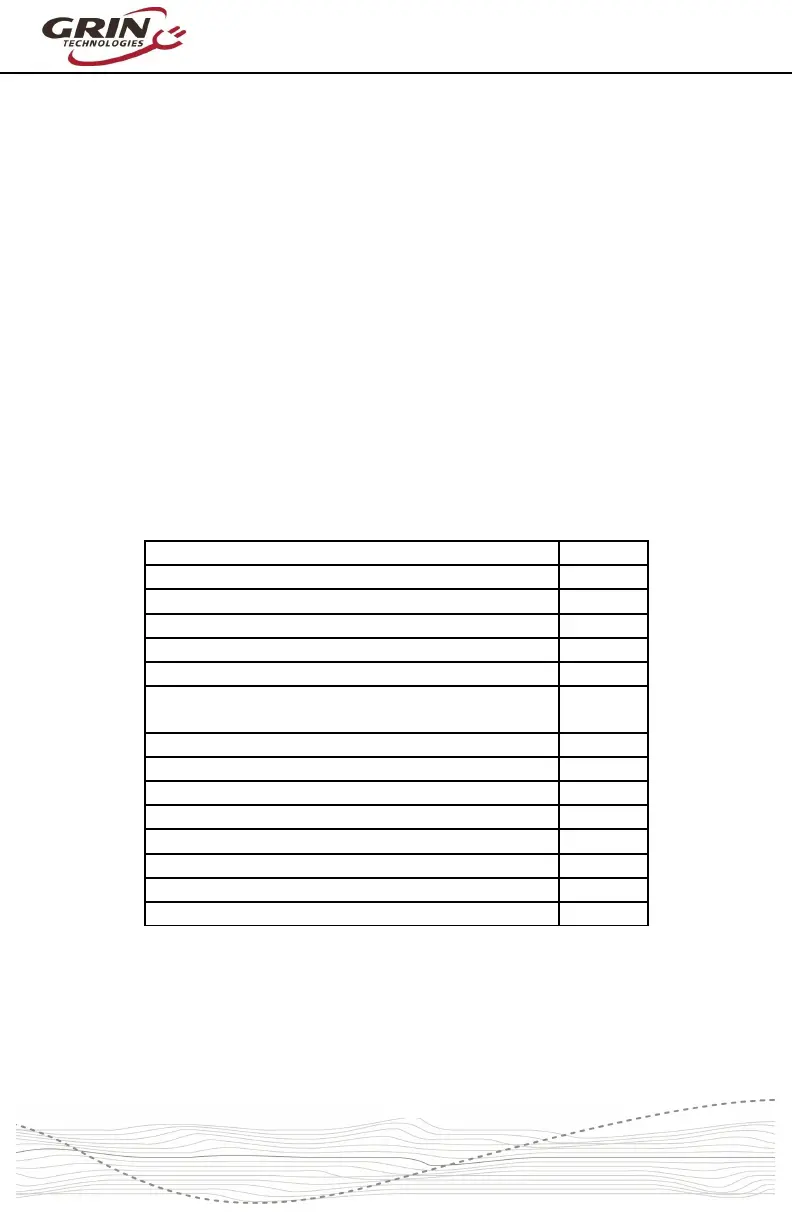
by its gear ratio. The following table lists the effective pole pairs for many
common motor series.
Table 1: Effective Pole Pairs of Common DD and Geared Hub Motors
Motor Family # Poles
Crystalyte 400, Wilderness Energy 8
BionX PL350 11
Crystalyte 5300, 5400 12
TDCM IGH 16
Crysatlyte NSM, SAW 20
Grin All Axle, Crysatlyte H, Nine Continent,
MXUS and Other 205mm DD Motors
23
Magic Pie 3, Other 273mm DD Motors, RH212 26
Bafang BPM, Bafang CST 40
Bafang G01, MXUS XF07 44
Bafang G02, G60, G62 50
Shengyi SX1/SX2 72
eZee, BMC, MAC, Puma, GMAC 80
Bafang G310, G311 88
Bafang G370 112
For motors not listed, either: open the motor to count the magnets pairs (and
gear ratio), or count the number of hall cycles that take place when you manually
turn the wheel one revolution. You can monitor the number of hall transitions via
the “Dashboard” tab of the software suite.
-12-