Harmonic Drive LLC 800-921-3332
26
Chapter 2 Guidelines for sizing
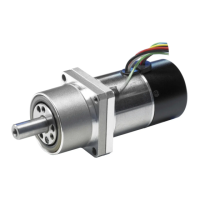
Speed
N
Time
ta
tr td ts
t: duty cycle
Time
Ta
Tr
Ta
Tor qu e
KLr
2-4-5 Calculating equivalent duty
The load conditions, which is torque, speed, moment of inertia,
acceleration/deceleration time, loading time, are limited by the
actuator to drive the load. To select the proper actuator, the
equivalent duty of the load should be calculated.
The %ED (percent equivalent duty) is:
%ED =
K
La x ta + KLr x tr + KLd x td
x 100
t
where, ta: acceleration time in second
td: deceleration time in second
tr: driving time in second
t: single cycle time in second
K
La: duty factor for acceleration time
K
Lr: duty factor for driving time
K
Ld: duty factor for deceleration time
•
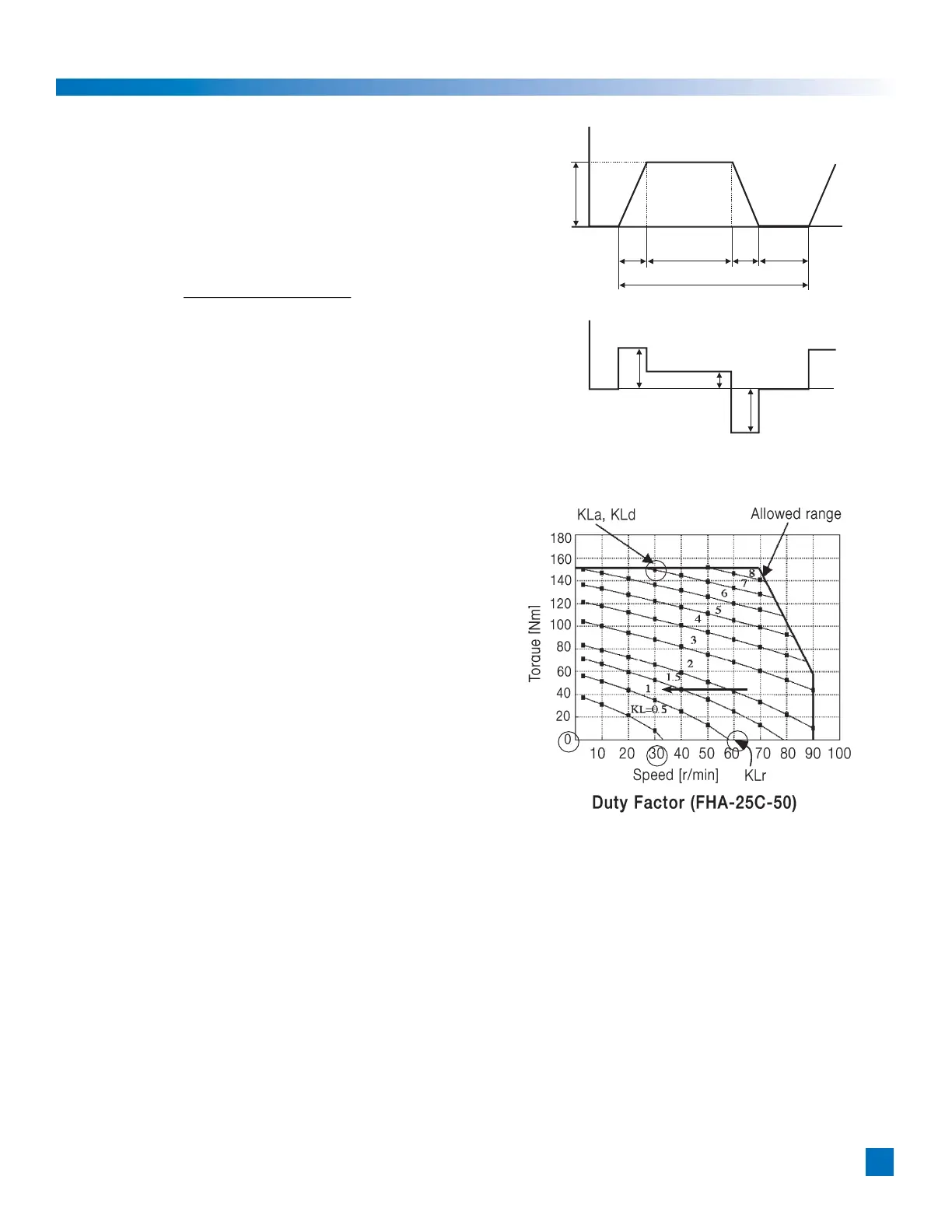
Example 2: getting duty factors of KLa, KLr and KLd
With an example of the duty factor graph for FHA-25C-50 actuator,
the way of getting the duty factors of K
La, KLr and KLd is described
as follows:
The load conditions are the same as the example described in
example 1: the inertia load is accelerated by the maximum
torque,
and is driven with a constant speed, and decelerated by the
maximum torque. The displacement angle is 120 degrees and
the cycle time is 2.0 s.
(1) K
La, and KLd: the speed is desired at 30 r/min as
the average of 0 and 60 r/min.
Then, K
La = KLd = 7.0 from the graph.
(2) K
Lr (ex.: KLr =1.0) from the graph pointing the load torque
Tr (ex. Tr= 0) and driving speed (ex: Nr=60r/min).
(3) The driving time is calculated as the area of the
trapezoid of speed-time graph. Then the
displacement angle is:
θ
= (N / 60) x {tr + (ta + td) / 2} x 360
Then, tr =
θ
/ (6 x N) – (ta +td) /2
As the 120 deg. is equal to 0.33rev (=120/360), the driving angle at the speed of 60r/min (=1r/s) is:
tr = (0.333-0.091)/1 = 0.242 s
(4) Because the cycle time is 2.0s, the %ED is obtained as follows:
%ED = (7 x 0.097+1 x 0.242 + 7 x 0.085) / 2 x 100 = 76%
It is possible to drive the actuator with the load specifications continuously,
because the %ED is less than 100%.
If the %ED is excesses 100%, correct the situation by:
• Changing the speed-time profile
• Reducing load moment of inertia
• Selecting an actuator with a larger frame size

 Loading...
Loading...