Shenzhen Hpmont Technology Co., Ltd Chapter 6 Function Introduction
HD30 Series Inverters User Manual ―63―
No. Name Description Range
factory setting
number 26 and 27 function), F03.10 is disabled.
S-curve characteristic time at starting acceleration
F03.12 S-curve characteristic time at ending acceleration 0.00
2.50s
0.20
S-curve characteristic time at starting deceleration
F03.14 S-curve characteristic time at ending deceleration 0.00
2.50s
0.20
Refer to the figure of parameter F03.00.
F03.15 Acceleration time of jog operation 1.0
6000.0s
6.0
Deceleration time of jog operation
F03.15 and F03.16 define the acceleration/deceleration time of jog operation.
Deceleration time of emergency stop
It defines the deceleration time of emergency stop.
6.2.5 Group F04 Process PID Control
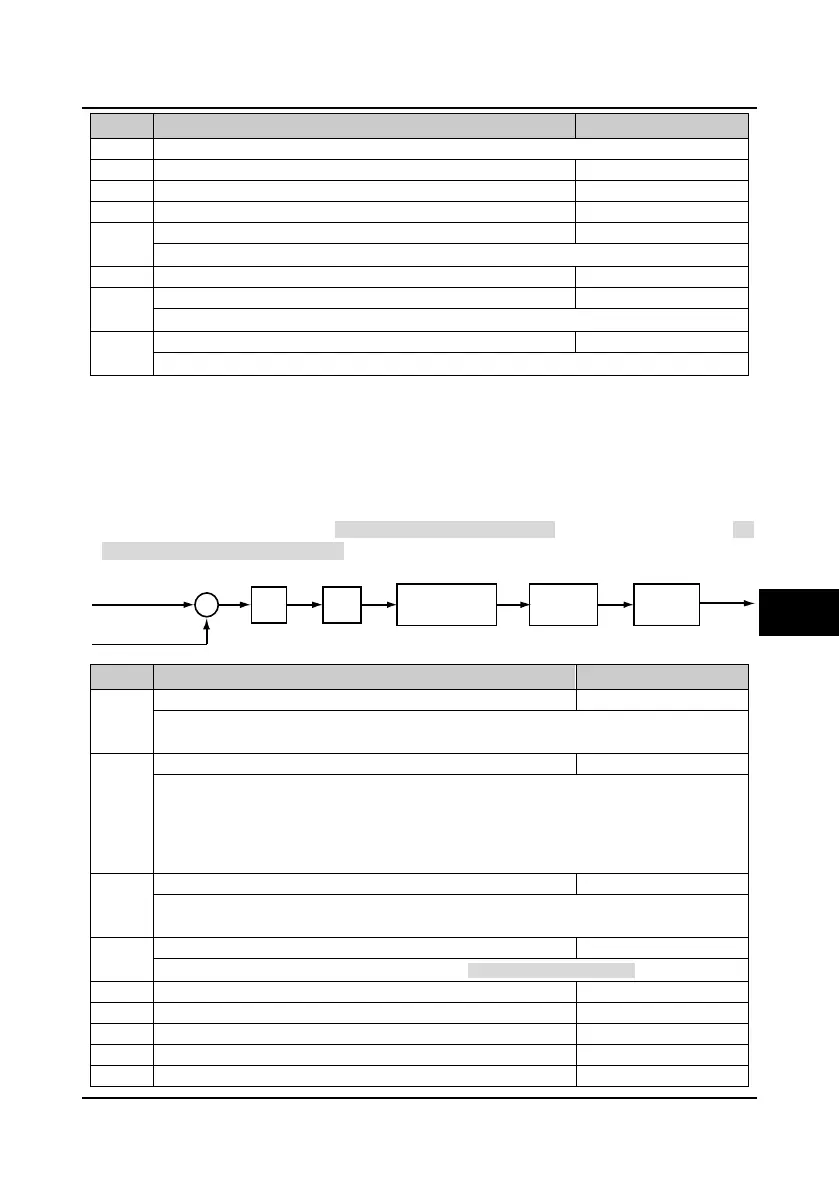
Closed-loop can be constituted not only by analogue reference and feedback but also by pulse
reference and feedback. Generally, the process PID control mode is used to regulate pressure,
liquid level and temperature etc.
The maximum analogue input or maximum pulse input frequency (F16.17) corresponds to the
maximum output frequency (F00.06). The process PID control is shown in the following figure:
No. Name Description Range
factory setting
Process PID control selection
0: PID control is disabled.
1: PID control is enabled.
F04.01 Reference source selection 0
2
0
0: Digital reference. It is the value of F04.03 reference.
1: AI analogue reference. It is the value of the analogue input voltage AI reference, and refer to Group
F16.
2: Terminal pulse reference. It is the value of the terminal pulse input reference, and maximum input
pulse frequency corresponding to 10V of the PID reference.
F04.02 Feedback source selection 0,1
0
0: AI analogue feedback.
1: Terminal pulse feedback.
F04.03 Setting digital reference -10.00
10.00 V
0.00
It defines the process PID regulator reference. When F04.01 = 0 (digital reference), it is enabled.
F04.04 Proportional gain (P) 0.00
10.00
2.00
F04.05 Integral time (I) 0.00
10.00s
1.00
F04.06 Integral upper limit 0.00
upper limit
50.00
F04.08 Differential amplitude limit value 0.00
upper limit
20.00
Output
PID
Bias
limit
Reference value
Feedback value
+
-
Closed-loop control
characteristics
Amplitude
limit control
Output filter
6
 Loading...
Loading...



