68
69
Последовательный интерфейс RS 232 и USB
Интерфейс USB
Universal Serial Bus (USB) — последовательная шинная систе-
ма для подключения прибора к ПК. Приборы, оборудованные
портом USB, можно соединять друг с другом во время работы
(поддерживается «горячая» коммутация).
Подключенные приборы и их характеристики определяются
автоматически. Интерфейс USB в сочетании с ПО labworldsoft
®
служит для эксплуатации в дистанционном режиме и для за-
грузки обновлений.
Драйвер шины USB для прибора (не устанавливайте
для Windows 10)
Сначала загрузите последнюю версию драйвера для прибо-
ра IKA с USB-интерфейсом с сайта http://www.ika.com/ika/lws/
download/usb-driver.zip и установите драйвер, запустив файл
Setup. Затем подключите прибор IKA с помощью кабеля дан-
ных USB с ПК.
Обмен данными осуществляется через виртуальный COM-
порт. Конфигурация, синтаксис команды и команды виртуаль-
ного COM-порта описаны для интерфейса RS 232.
Конфигурация
Последовательный интерфейс RS 232 можно использовать
для внешнего управления прибором с помощью компьютера
и подходящих прикладных программ (labworldsoft).
Для увеличения безопасности при управлении прибором
RET control-visc с помощью ПК можно активировать
функцию контрольного алгоритма (Watchdog) для
контроля постоянного потока данных (см. раздел
«Функция контрольного алгоритма Watchdog»).
• Функцией каналов интерфейса является передача между
лабораторным прибором и системой автоматизации
избранных сигналов, спецификация которых приводится
в стандарте EIA RS 232 в соответствии со стандартом
DIN 66020, часть 1. Назначение сигналов приведено на
рисунке.
•
На электронные свойства канала интерфейса и распределение
состояния сигналов распространяется стандарт RS 232 в
соответствии со стандартом DIN 66259, часть 1.
• Способ передачи: асинхронная передача сигналов в старт-
стопном режиме.
• Тип передачи: полный дуплекс
• Формат символов: создание символов согласно формату
данных, установленному стандартом DIN 66022 для старт-
стопного режима. 1 стартовый бит; 7 бит символа; 1 бит
четности (четный = Even); 1 стоповый бит.
• Скорость передачи: 9600бит/с.
• Управление потоком данных: нет
• Процедура доступа: Передача данных с прибора на
компьютер осуществляется только по запросу компьютера.
Синтаксис команд
Для команд действительны следующие положения:
• Команды отправляются только с компьютера (ведущее
устройство) на лабораторный прибор (ведомое устройство).
• Передача данных с лабораторного прибора выполняется
исключительно по запросу компьютера.
• Команды и параметры, а также последовательно
передаваемые параметры разделяются по меньшей мере
одним пробелом (код: hex 0x20).
• Каждая отдельная команда, в том числе параметры и
данные, и каждый ответ заключаются в последовательности
«Перевод каретки Перевод строки» (код: hex 0x0D и 0x0A) и
состоит не более чем из 10 символов.
• Десятичным разделителем в числе с плавающей запятой
является точка (код: hex 0x2E).
Упомянутые выше модели всецело соответствуют
рекомендациям комиссии NAMUR (Комиссия по стандартизации
контрольно-измерительной техники в химической
промышленности) (Рекомендации NAMUR по изготовлению
электрических разъемных соединений для передачи аналоговых
и цифровых сигналов на отдельные лабораторные контрольно-
измерительные устройства. Ред. 1.1).
Обзор доступных команд NAMUR
Используемые сокращения:
X,y = Параметр нумерации (целое число)
m = Значение переменной, целое число
n = Значение переменной, число с плавающей запятой
X = 1 датчик температуры среды
X = 2 температура нагревательной пластины
X = 3 максимально допустимая температура
нагревательной пластины
X = 4 частота вращения
X = 5 изменение вязкости
X = 7 датчик температуры среды-теплоносителя
X = 80 значение рН
X = 90 Вес значение
X = 54 Error 5, время срабатывания (п) (0 <= n <= 30)
X = 55 режим прерывания, время цикла (с)
( 10 <= n <= 600 )
X = 56 режим прерывания, длительность прерывания (с)
( 5 <= n <= 60 )
Команды NAMUR Функция
Индикация
(дополни-
тельная)
IN_NAME Запрос обозначения
IN_PV_X X=1; 2; 3; 4; 5; 7; 80; 90 Считывание фактического значения
IN_SOFTWARE_ID Запрос идентификационного номера и версии ПО
IN_SP_X X=1; 2; 3; 4; 7; 8; 12; 42;
54; 55; 56;
Считывание заданного значения
IN_TYPE Запрос распознавания лабораторного прибора
OUT_NAME name Вывод обозначения. (макс. 6символов. По умолчанию: IKARET)
OUT_SP_12@n Установка максимально допустимой температуры на случай срабатывания контрольного
алгоритма (WD) с дублированием установленного значения
OUT_SP_42@n Установка максимально допустимой частоты вращения на случай срабатывания контроль-
ного алгоритма (WD) с дублированием установленного значения
OUT_SP_X n X=1; 2; 4; 7; 54; 55; 56 Установка заданного значения на n
Функция контрольного алгоритма, контроль
последовательного потока данных
Если после активации этой функции (см. команды NAMUR) в
пределах заданного времени ожидания данная команда не
будет передана с ПК повторно, то, в зависимости от режима
контроля, функции нагрева и перемешивания выключаются
или возвращаются к предварительно установленным
заданным значениям.
Прерывание передачи данных возможно, например, при
сбоях операционной системы, перебоях питания ПК либо
отключениях соединительного кабеля, ведущего к прибору
RET control-visc.
Режим контрольного алгоритма 1
Если обмен данными прерывается (отсутствует в течение
времени, превышающего заданное время ожидания), то
функции нагрева и перемешивания выключаются, а на
дисплее отображается ER 2.
Режим контрольного алгоритма 2
Если обмен данными прерывается (отсутствует в течение
времени, превышающего заданное время ожидания), то
для заданной частоты вращения и заданной температуры
устанавливаются максимально допустимые значения на
случай срабатывания контрольного алгоритма (т.н. значения
WD). Отображается предупреждение WD.
Возможности связи между RET control-visc и внесшими
устройствами
Для соединения прибора RET control-visc и внешних устройств
можно приобрести следующие адаптеры и кабели для
адаптеров производства фирмы IKA.
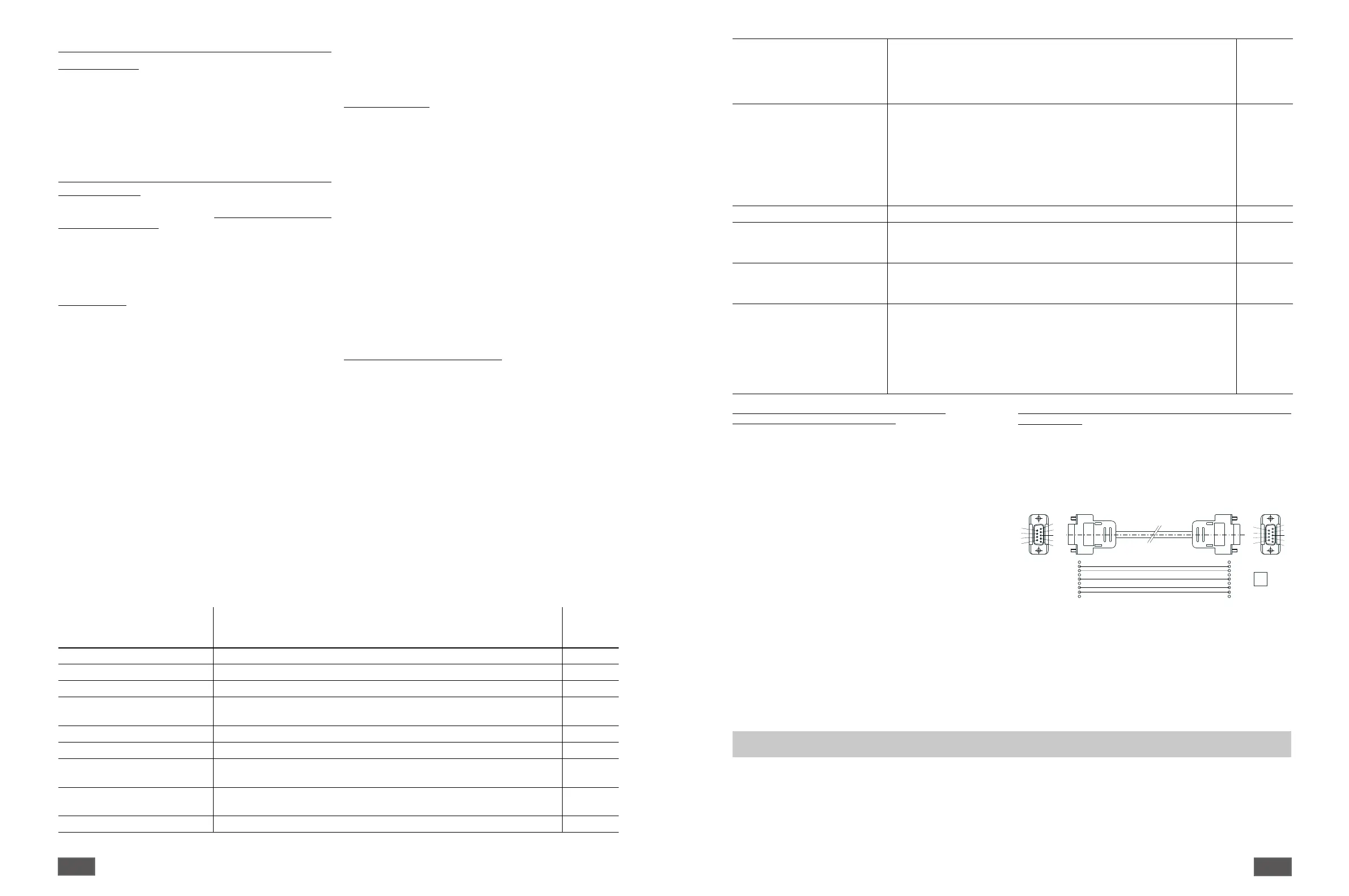
Кабель PC 1.1
Кабель PC 1.1 требуется для соединения 9-контактного гнезда с
компьютером.
1
RxD 2
TxD 3
4
GND 5
6
RTS 7
CTS 8
9
PC
1
2
3
4
5
6
7
8
9
1
2 RxD
3 TxD
4
5 GND
6
7 RTS
8 CTS
9
5
4
3
2
1
9
8
7
6
OUT_WD1@m Режим контрольного алгоритма 1: При возникновении события WD1 функции нагрева и
перемешивания выключаются, и на дисплее отображается «ER 2». Установка времени ожи-
дания на m(20...1500)секунд с дублированием времени ожидания. Эта команда запускает
функцию контрольного алгоритма и обязательно должна отправляться в пределах задан-
ного времени ожидания
OUT_WD2@m Режим контрольного алгоритма 2: при возникновении события WD2 заданная частота вра-
щения устанавливается на уровне установленной максимально допустимой частоты вра-
щения WD, а заданное значение температуры— на уровне установленной максимально
допустимой температуры WD. Отображается предупреждение WD. Событие WD2 можно
сбросить с помощью команды OUT_WD2@0. При этом также будет остановлена функция
контрольного алгоритма. Установка времени ожидания на m(20...1500)секунд с дубли-
рованием времени ожидания. Эта команда запускает функцию контрольного алгоритма и
обязательно должна отправляться в пределах заданного времени ожидания.
RESET Выключение функции прибора.
START_X X=1; 2; 4; 5; 7
X=80; 90
Включение (дистанционной) функции прибора Дистан-
ционный
режим
STOP_X X=1;2;4;5;7
X=80; 90
Выключение (дистанционной) функции прибора. Переменная, заданная командой OUT_
SP_X, сохраняется.
Дистан-
ционный
режим
STATUS_90 Отображается состояние весов.
Определение битов состояния весов.
Бит0: стабильное состояние весов (1: да, 0: нет)
Бит3: выполнено тарирование весов (1: да, 0: нет)
Бит4: весы вкл. (1: да, 0: нет)
Бит9: весы перегружены (1: да, 0: нет)
Бит10: питание весов вкл. (1: да, 0: нет)
Принадлежности
Принадлежности см. на сайте www.ika.com.
 Loading...
Loading...