Bit change_set_immediately = 0 :
Object Dictionary Entries
Index Object Name Type Attr.
0x607A VAR Target Position Integer32 rw
0x6080 VAR Max Motor Speed Unsigned16 rw
0x6081 VAR Profile Velocity Unsigned32 rw
0x6082 VAR End Velocity Unsigned32 rw
0x6083 VAR Profile Acceleration Unsigned32 rw
0x6084 VAR Profile Deceleration Unsigned32 rw
0x6086 VAR Motion Profile Type Integer16 rw
0x6067 VAR Position Window Unsigned32 rw
0x6068 VAR Position Window Time Unsigned16 rw
0x607F VAR Max Profile Velocity Unsigned32 rw
0x3081 VAR Speed Modulation Source Unsigned32 rw
Index 0x607
-1)
Default Value 0
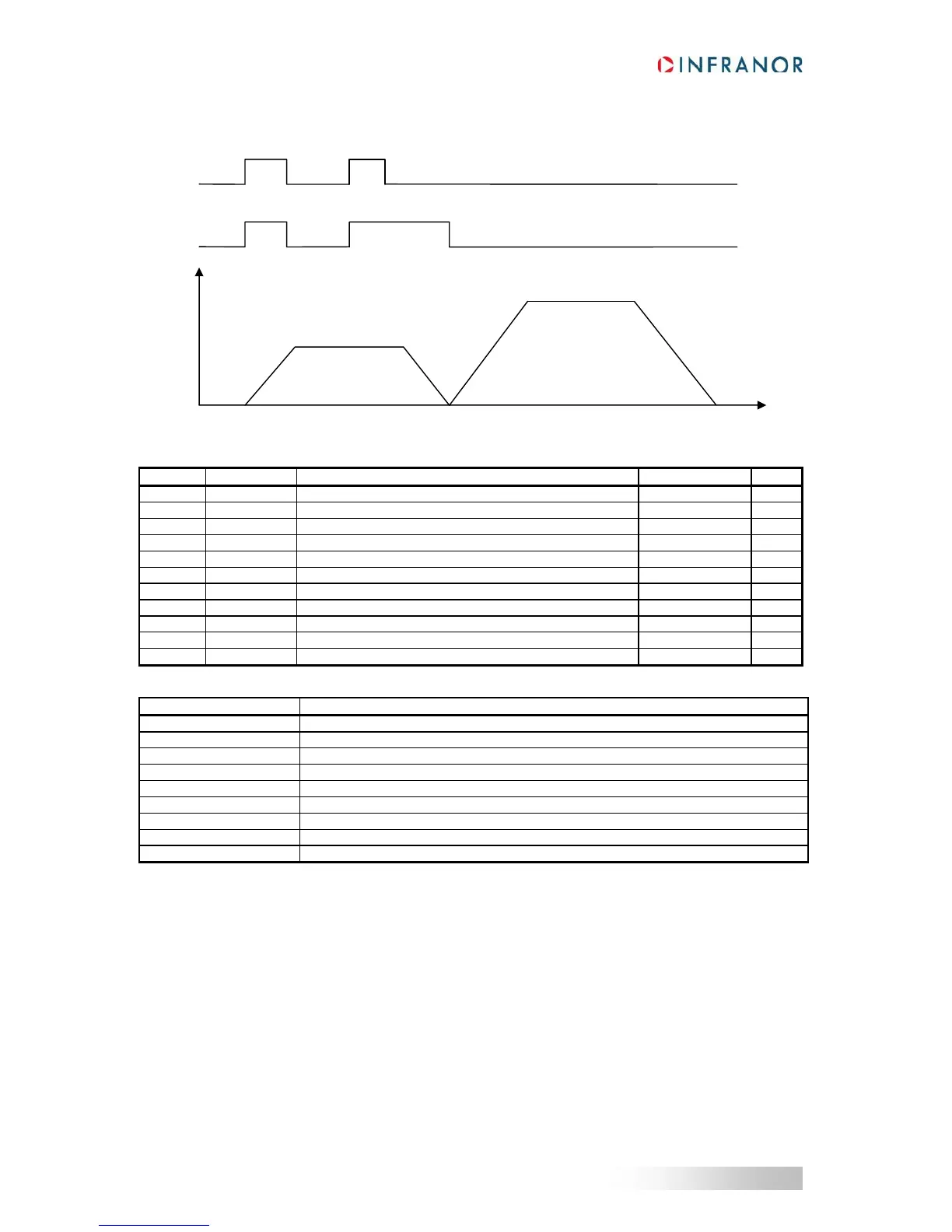
Target position is the final position where the motor will move to in profile position mode. The start position is the
current position. The positioning begins with rising edge of bit 4 of the control word (new set point). Bit 6 of control
word indicates if the target position is absolute (=0) or relative (=1) movement.
new set point
set point acknowledgement