trapulsPac - User Guide
Chapter 3 – Reference
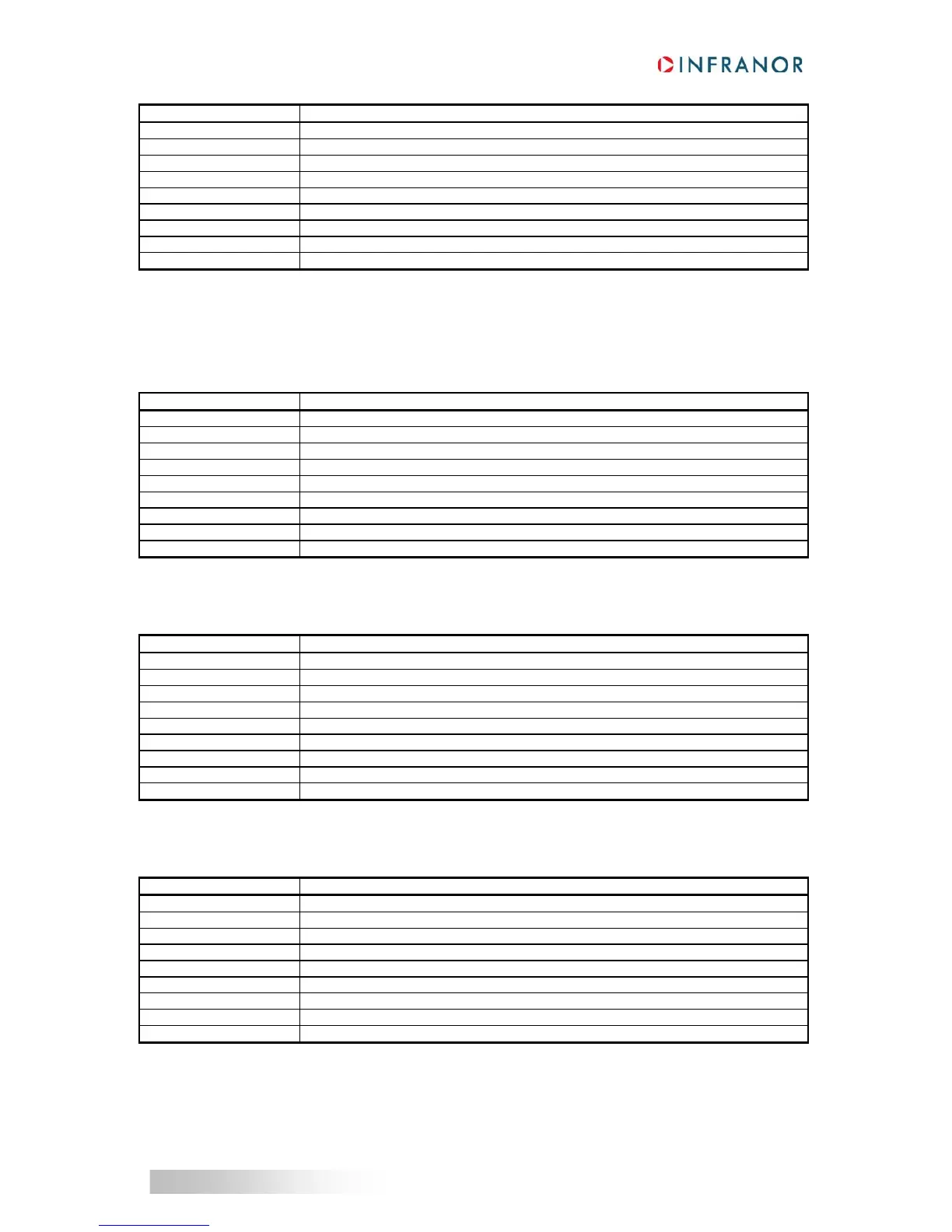
Index 0x6080
Name Max Motor Speed
Object Code VAR
Data Type Integer32
Object Class all
Access rw
PDO Mapping No
Unit rpm
Value Range 100...60000
Default Value 3000
The Max. motor speed defines the maximum speed the drive can reach. To avoid a saturation of the servo loop,
the running speed must be less than Max. motor speed (depends on the overshoot accepted for the servo loop
response).
This parameter modifies the value of the Max Profile Velocity 0x607F.
Index 0x6081
Name Profile Velocity
Object Code VAR
Data Type Unsigned32
Object Class pp
Access rw
PDO Mapping Possible
Unit User Velocity Unit
Value Range -
Default Value 0x1000
The Profile Velocity is the running velocity for a positioning. If the positioning is too short, the profile velocity may
not be reached.
Index 0x6082
Name End Velocity
Object Code VAR
Data Type Unsigned32
Object Class pp
Access rw
PDO Mapping Possible
Unit User Velocity Unit
Value Range -
Default Value 0
The End Velocity is the final velocity value when the target position is reached. When the motor has to stop at the
target position, End Velocity=0.
Index 0x6083
Name Profile Acceleration
Object Code VAR
Data Type Unsigned32
Object Class pp
Access rw
PDO Mapping No
Unit User acceleration unit
Value Range -
Default Value 0x10000