6. Description of Parameters
- 144 -
6
Ƶ
F1-37 = 2: Dynamic Auto-tuning
If motor has constant output characteristic and is used for high-accuracy application, disconnect
motor from load and use dynamic auto-tuning.
The dynamic auto-tuning process is as follows:
Steps Description
Step 1 Power on the AC drive. Set F0-02 = 0 to select the operation panel as command source.
Step 2 Input motor nameplate parameters (F1-00 to F1-05) correctly.
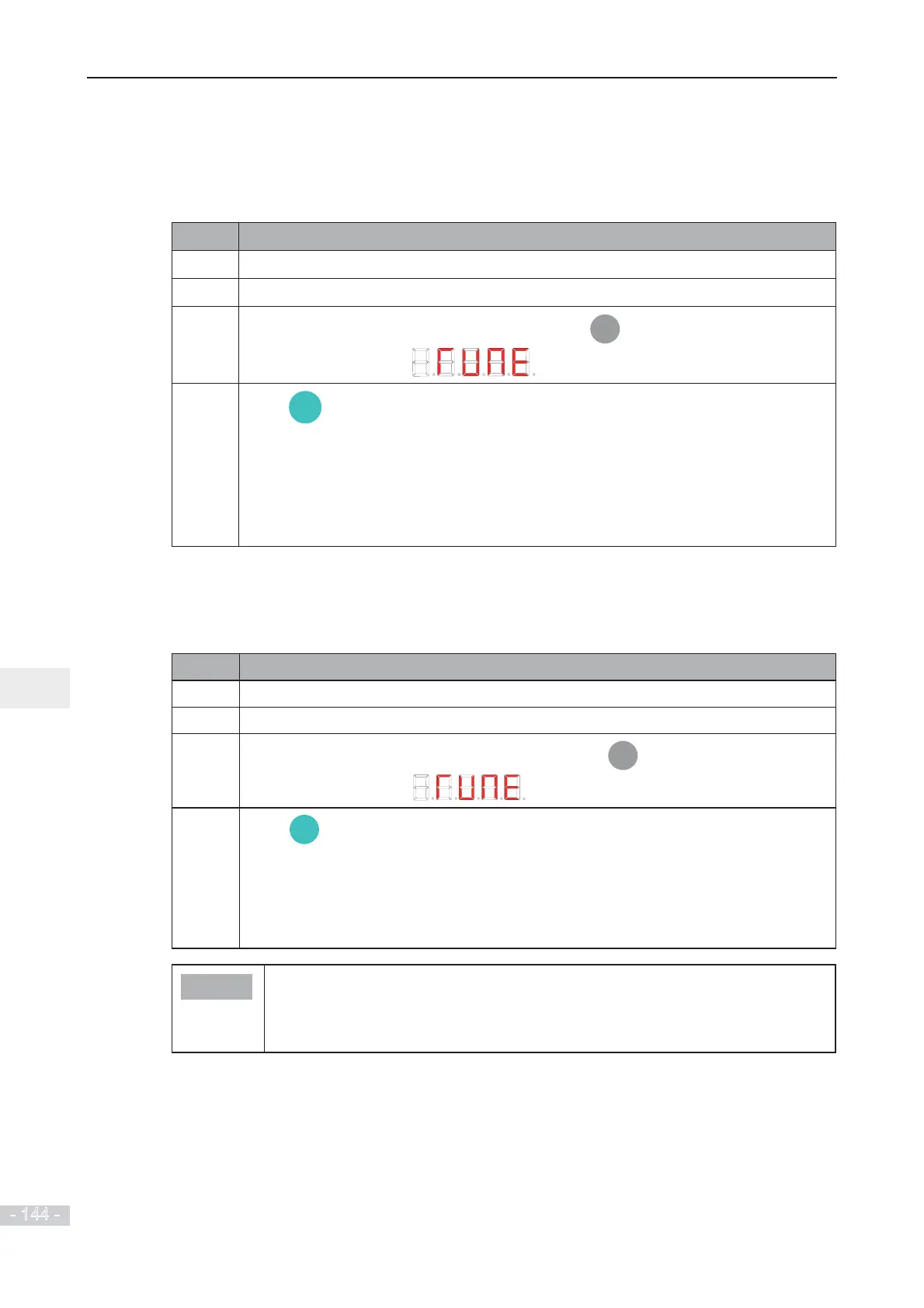
Step 3
Set F1-37 = 2 to select dynamic auto-tuning. Press
ENTER
on the operation panel. The
operation panel displays
.
Step 4
Press
RUN
on the operation panel.
The AC drive drives motor to accelerate/decelerate and run in forward/reverse direction.
The RUN indicates becomes ON and auto-tuning lasts for a period.
After the preceding display disappears and the operation panel returns to normal
parameter display state, it indicates that auto-tuning is completed.
Parameters F1-06 to F1-10 are obtained.
Ƶ
F1-37 = 3: Static Auto-tuning 2
If motor cannot be disconnected from load, use static auto-tuning 2. The static auto-tuning 2
process is as follows:
Steps Description
Step 1 Power on the AC drive. Set F0-02 = 0 to select operating panel as command source.
Step 2 Input motor nameplate parameters (F1-00 to F1-05) correctly.
Step 3
Set F1-37 = 3 to select the static auto-tuning 2. Press
ENTER
on the operation panel. The
operation panel displays
.
Step 4
Press
RUN
on the operation panel.
Motor does not rotate but gets energized. The RUN indicates becomes ON.
After the preceding display disappears and the operation panel returns to normal
parameter display state, it indicates that auto-tuning is completed.
Parameters F1-06 to F1-10 are obtained.
Note
Ɣ
If it is not possible to perform motor auto-tuning on site, input motor parameters
of the same motor model into parameters F1-00 to F1-10.
Ɣ
You can also perform motor auto-tuning via terminal I/O control or serial comms.
(F0-02 = 1 or 2).
 Loading...
Loading...
