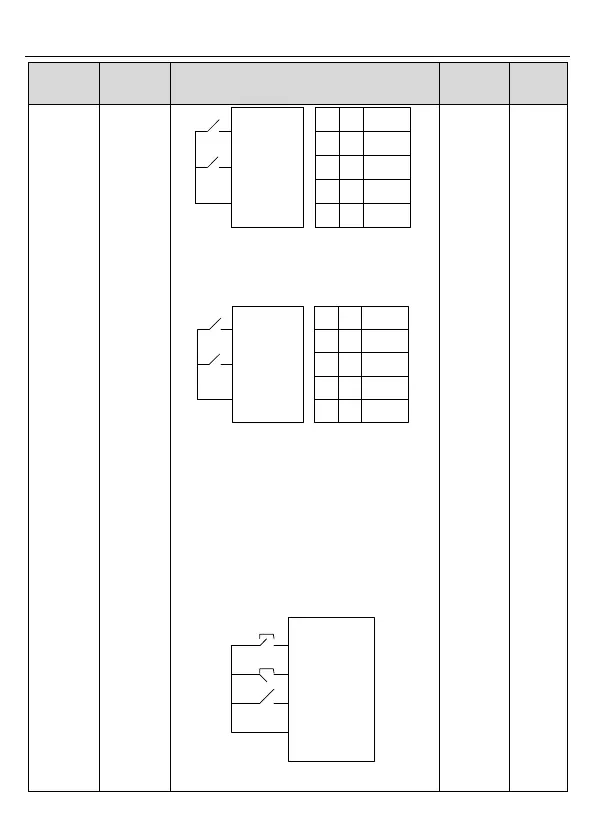
1: 2-wire control 2, the enabling separated
from the direction. In this mode, FWD is the
enabling terminal. The direction depends on
the defined REV state.
2: 3-wire control 1; This mode defines Sin as
the enabling terminal, and the running
command is generated by FWD, while the
direction is controlled by REV. During
running, the Sin terminal needs to be closed,
and terminal FWD generates a rising edge
signal, then the VFD starts to run in the
direction set by the state of terminal REV; the
VFD needs to be stopped by disconnecting
terminal Sin.
 Loading...
Loading...