Correct the power displaying of motor 1.
Only impact the displaying value other than the control
performance of the inverter.
Setting range: 0.00~3.00
1.00 ○
Speed loop
proportional
gain1
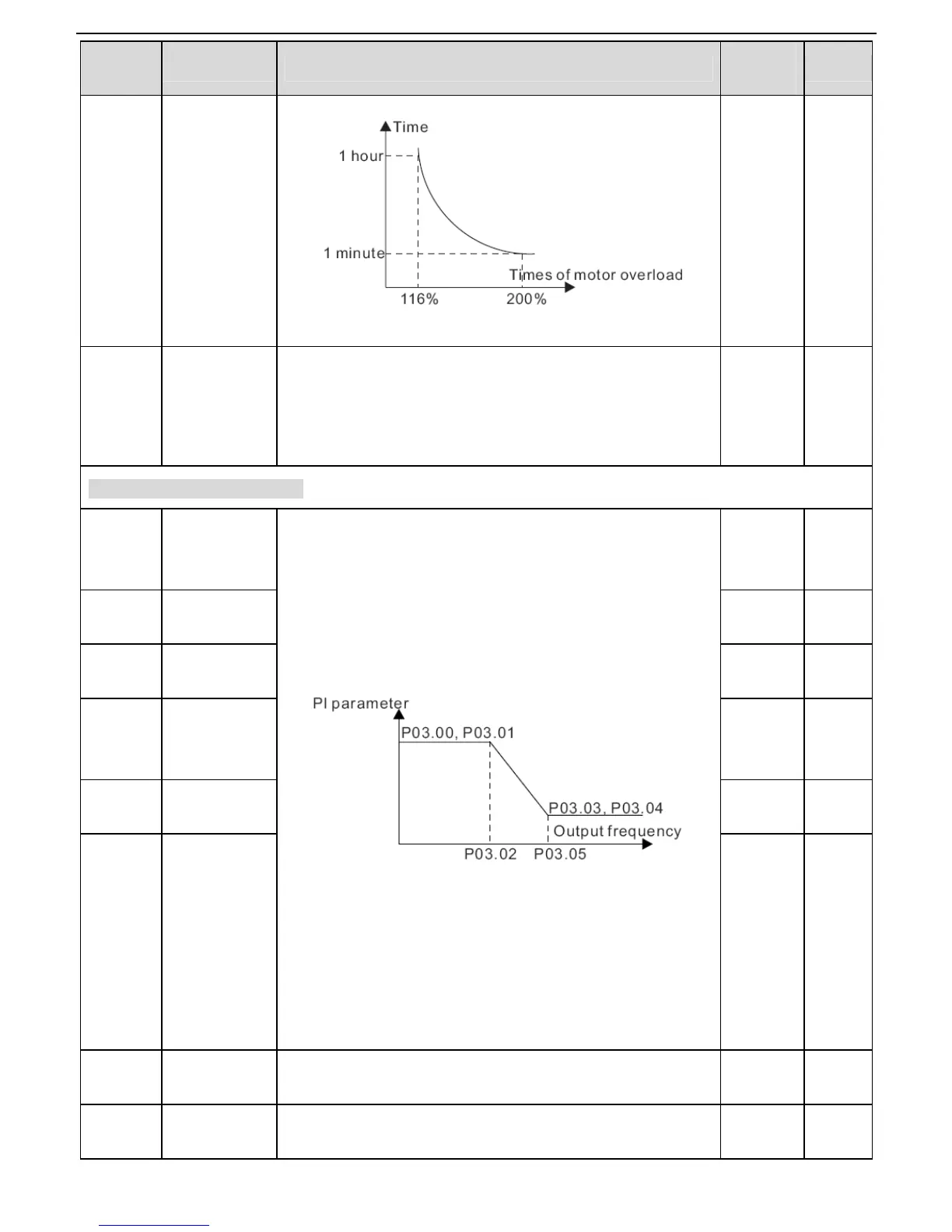
The parameters P03.00~P03.05 only apply to vector control
mode. Below the switching frequency 1(P03.02), the speed
loop PI parameters are: P03.00 and P03.01. Above the
switching frequency 2(P03.05), the speed loop PI
parameters are: P03.03 and P03.04. PI parameters are
gained according to the linear change of two groups of
parameters. It is shown as below:
PI has a close relationship with the inertia of the system.
Adjust on the base of PI according to different loads to meet
various demands.
The setting range of P03.00 and P03.03: 0~200.0
The setting range of P03.01 and P03.04: 0.000~10.000s
The setting range of P03.02: 0.00Hz~P00.05
The setting range of P03.05: P03.02~P00.03
20.0
○
Compensation
coefficient of
Slip compensation coefficient is used to adjust the slip
frequency of the vector control and improve the speed
100% ○
 Loading...
Loading...