4 — PROGRAMMABLE PARAMETERS
pg. 101
Return to TOC Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022
APPLICATION SETUP — IMU MENU
e controllers with part number -1xx are available with an Inertial Measurement Unit (IMU) for
improved safety, better drivability and other fault detection. e acceleration and rational speeds are
reported as VCL variables with the following descriptions.
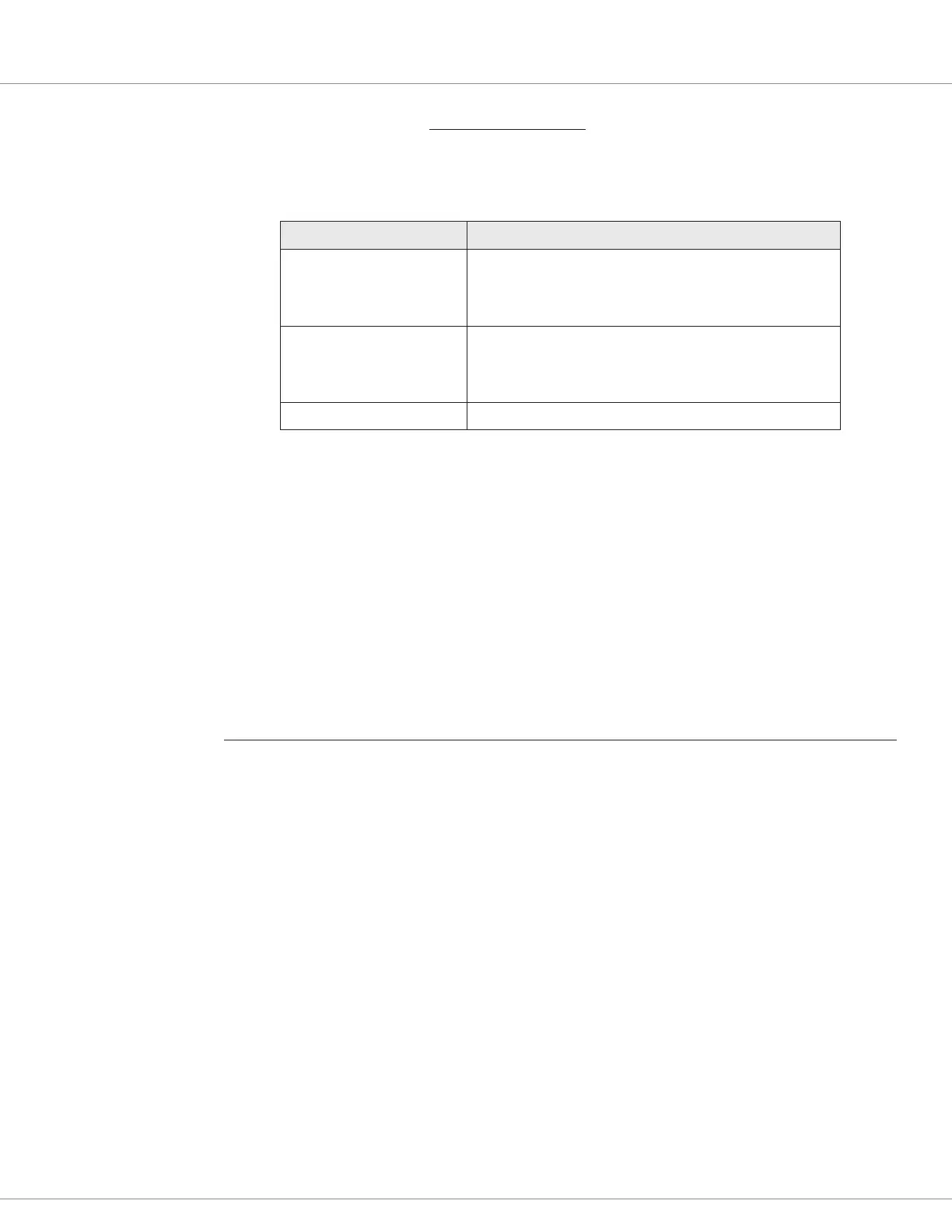
IMU Parameter Description
Acceleration
Axes: 3
Range: ±16G
Sample Rate: >200Hz
Resolution: ≤0.5 mG/count
Rotational Speed
Axes: 3
Range: ±2000°/sec
Sample Rate: >200Hz
Resolution: ≤70mdeg/sec/count
Temperature Range –40°C to +105°C
e listed (below) IMU functionality is provided without need for additional VCL:
• Conguration of controller reference frame to that of vehicle's to account for varied
installation orientations
1
.
• VCL accessible variables for vehicle acceleration, turn-rates(yaw, etc), and angles(roll, pitch).
• Improved grade estimate for hill-hold through estimating better holding torque.
• Improved safety through improved hill-hold, tip-over protection, detection of unintended
accel/deceleration and prevention of motor run-aways due to encoder position loss.
• Improved estimation of speed/motor position at low speeds, low-count encoders or to provide
a better encoder LOS mode.
1
Allows controller to report/determine vehicle’s roll, pitch, acceleration, jerk, heading for any installation orientation.

 Loading...
Loading...







