4 — PROGRAMMABLE PARAMETERS
Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022 Return to TOC
pg. 138
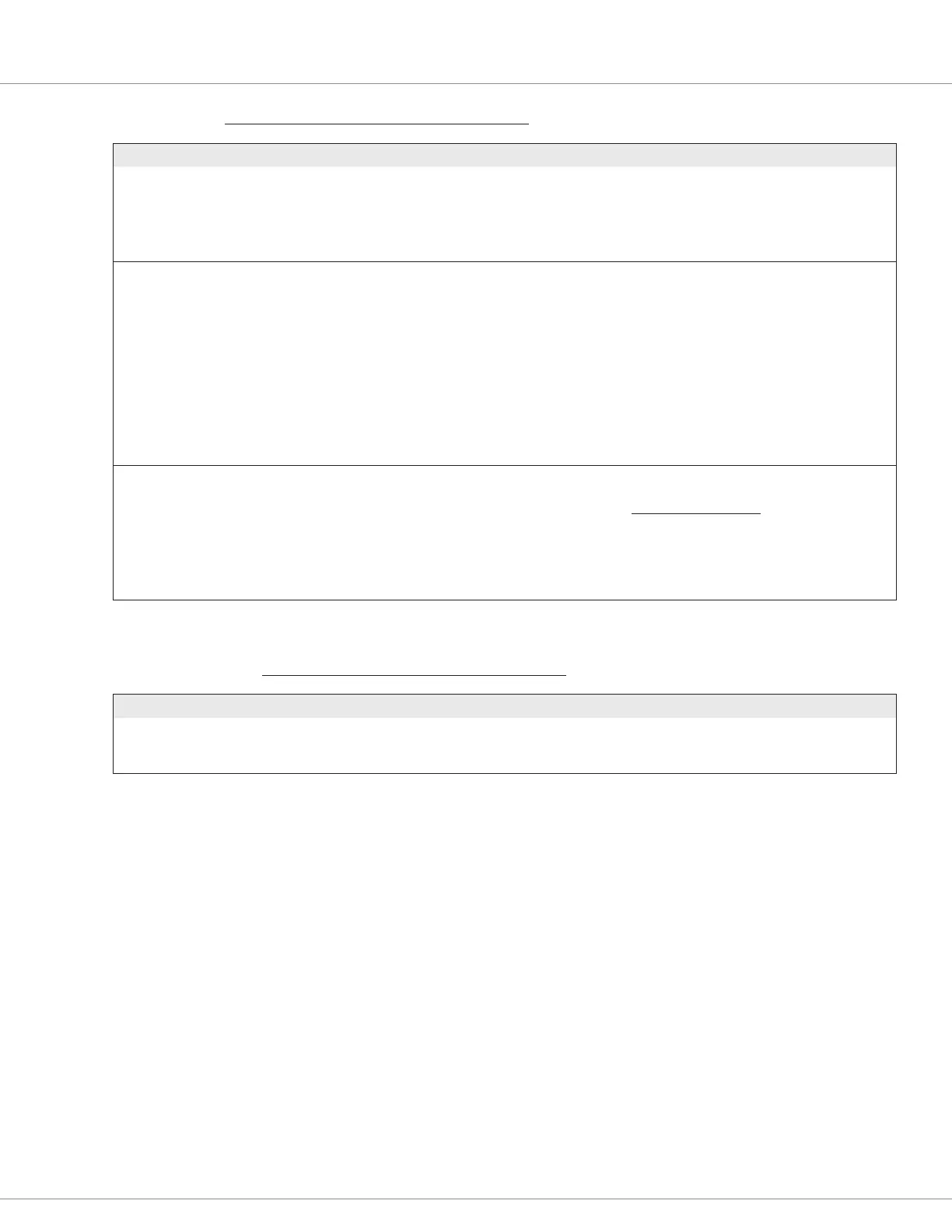
MOTOR SETUP/QUADRATURE ENCODER — ENCODER FAULT SETUP MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
Fault Detection Enable
Encoder_Fault_Detection_
Enable
0x34E3 0x00
On/Off
On/Off
On Setting this parameter to On enables the encoder fault
checking. The three fault conditions checked are:
Encoder Fault (fault code 36).
Stall Detected (fault code 73).
Encoder Pulse Error (fault code 88).
Encoder Pulse Fault Detect
Time
Encoder_Pulse_Fault_Detect_
Time
0x34E5 0x00
0.0 – 3.0 s
0 – 94
0.5 sec Denes the minimum time it takes for the controller, while the
vehicle is in motion, to detect that the encoder and the Encoder
Steps parameter do not match. When the Encoder Steps setup is
incorrect, the motor controller cannot properly calculate the AC
motor eld orientation. The loss of eld orientation can cause the
motor to spin up toward full speed once any throttle is applied.
Applying the throttle and then releasing it, while the drive current
is signicant and the motor is still accelerating, sets this timer.
Note that the motor can spin to high rpms for several seconds
before conditions allow the controller to detect a fault.
The Encoder Pulse Error (fault code 88) is set when this fault occurs.
Setting the parameter to zero will disable this fault detection.
Fault Stall Time
Enc_Fault_Stall_Time
0x34E2 0x00
0 – 10 s
0 – 5000
5 sec Sets a timer when no motor encoder movement is detected. If no
motor movement (encoder pulse) is detected for the programmed
Fault Stall Time with high current applied a Stall Detected fault is
issued (fault code 73).
For example, when driving up a ramp and the vehicle ‘stalls’
because it is under-powered or overloaded (driver applying full
throttle), or if driven into an immovable object, these types of
conditions will set this fault.
MOTOR SETUP/QUADRATURE ENCODER — SPEED FILTER MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
Speed Filter Frequency
Speed_Filter_Frequency
0x3224 0x00
0.1 – 250 Hz
0.1 – 250
30.0 Hz Cutoff frequency for speed ltering. Note, this value is now in
hertz, when updating from old versions you may need to divide by
2pi (3.14159) to get the exact performance.

 Loading...
Loading...




