4 — PROGRAMMABLE PARAMETERS
pg. 137
Return to TOC Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022
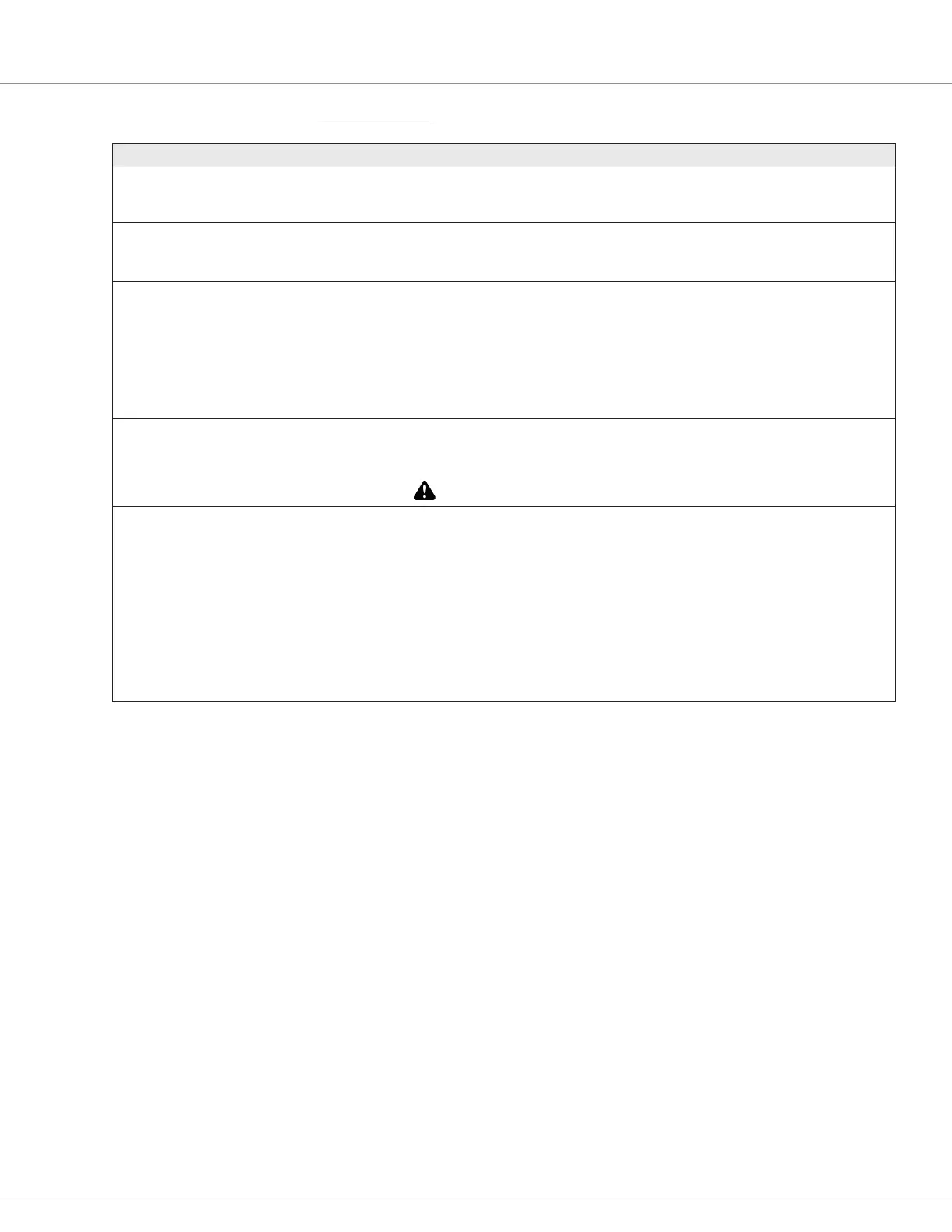
MOTOR SETUP — QUADRATURE ENCODER MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
5V Output Enable
Ext_5V_Output_Enable
0x36A8 0x00
On – Off
0 – 1
On Enables the 5V Power Supply Output.
12V Output Enable
Ext_12V_Output_Enable
0x36A7 0x00
On – Off
0 – 1
Off Enables the 12V Power Supply Output.
Encoder Steps
Encoder_Steps
0x34E7 0x00
32 – 4096
32 – 4096
64
[PCF]
Sets the number of encoder pulses per revolution. This must be
set to match the encoder; see the motor nameplate.
Note: Do not change this parameter while the controller is
powering the motor. Any time this parameter is changed a
Parameter Change Fault (fault code 49) is set and must be cleared
by cycling power; this protects the controller and the operator.
Adjusting this parameter can be hazardous; setting it improperly
may cause vehicle malfunction including un-commanded drive.
Phasing Order
Phasing_Order
0x34EA 0x00
Off – On
0 – 1
Off Inverts the direction of feedback relative to control which can
result from phasing and encoder wiring swaps. Changing this
parameter in PMAC requires commissioning, do not set manually.
Changing this parameter can cause uncommanded motion.
Care should be taken when changing this parameter.
Pullup Override
Pullup_Override
0x32D5 0x00
0 – 6
0 – 6
0 Set this to override the state of the controller’s internal pullups
as follows:
0 = Not overridden (use feedback type default).
1 = Encoder primary pullups on.
2 = Encoder primary pullups off.
3 = Encoder index pullup on.
4 = Encoder index pullup off.
5 = Both pullups on.
6 = Both pullups off.
When using external pullups (as must be done with high
frequency encoder inputs, both pullups must be turned off.

 Loading...
Loading...







