4 — PROGRAMMABLE PARAMETERS
pg. 39
Return to TOC Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022
SDO WRITE MESSAGE
To retain parameter values in non-volatile memory (NVM) via CANopen SDO write messages, rst
write the value of one (01h) to the Least Signicant [data] Byte (LSB) of the 32-bit parameter SDO_
NVM_Write_Enable (Object Index 0x2008, sub-index 0x00). is will cause parameter changes
to be written to non-volatile memory. Note that having the SDO_NVM_Write_Enable parameter
set to zero (0) only saves the parameter changes to ephemeral (RAM) memory. RAM values are
not stored over keyswitch cycles. Always return this parameter to the disabled state (= 0), when
nished writing parameter values/changes. e state can be checked in CIT using the List View
option in Programmer.
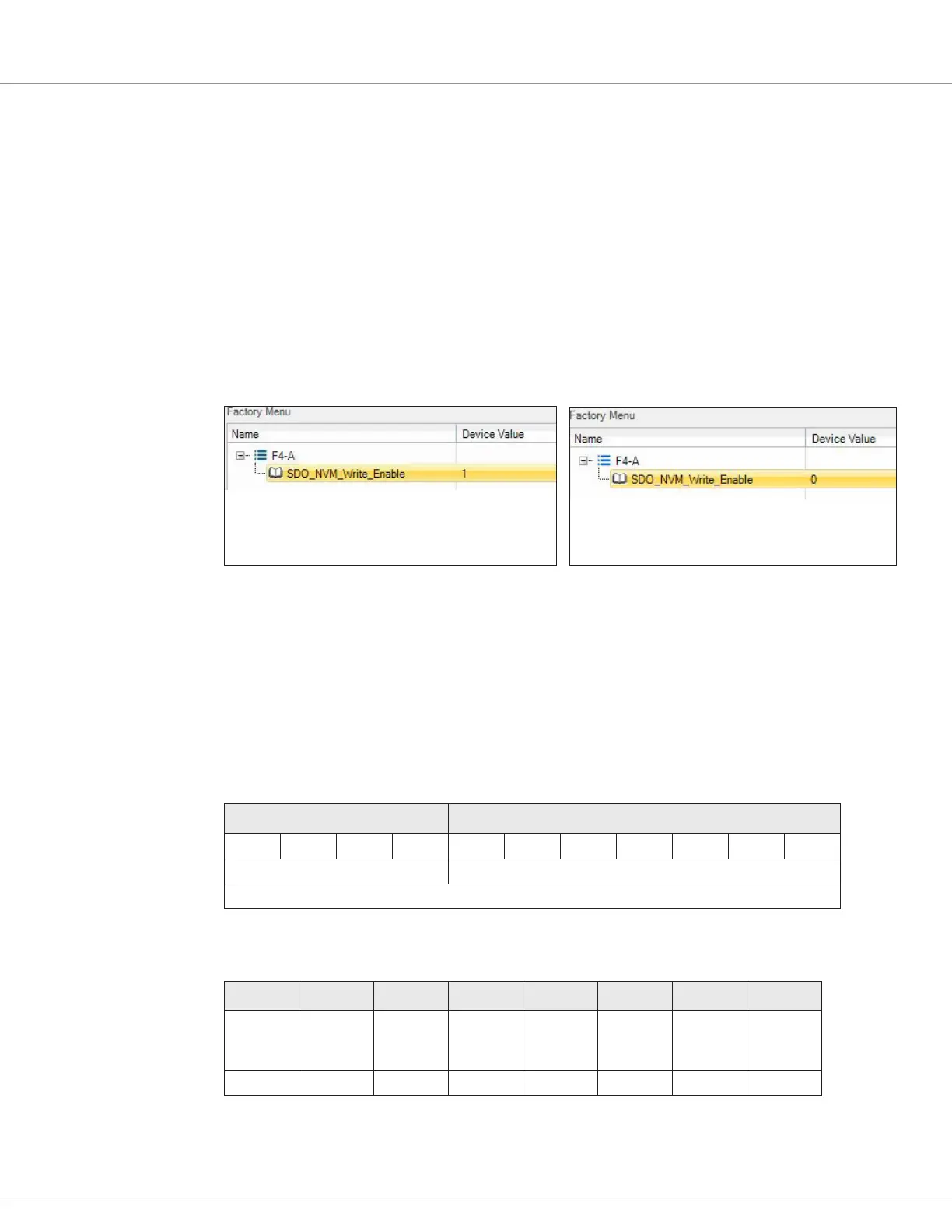
Use the CIT List-View image illustrated below (F4 example). In the rst image, the controller (Node
ID 0x26) is set to write parameter values to NVM (value = 1). In the second image (the default value
= 0), the controller will only write parameter values to RAM.
SDO_NVM_Write_Enable = 1 (enabled) SDO_NVM_Write_Enable = 0 (disabled)
In the example illustrated above, the SDO message to a controller with a Node ID = 26h (38d, 0010
0110b) is constructed by rst writing a value of “1” to the SDO_NVM_Write_Enable parameter
(enables), then a value of “0” (disables) as dened, below. Here, the data bytes are shown using the
1 – 8 nomenclature. It could as easily be labeled data bytes 0 – 7. e control byte uses the SDO-Rx
23h, as the parameter is 32-bits, so all data bytes are “written” even as the values in the data bytes are
zero (00h). e message format is Little Endian, therefore data byte #5 is the LSB.
COB-ID
Function Code Node ID of target Ancillary Controller
1 1 0 0 0 1 0 0 1 1 0
SDO-Rx Node 26h
COB-ID = 626h
SDO_NVM_Write_Enable (Object Index 0x2008, sub-index 0x00) = ‘enable’ (01 = 1 in byte 5,
the LSB)
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Control
(write)
LSB
Object
Index
MSB
Object
Index
Sub
Index
Data Data Data Data
23h 08 20h 00 01 00 00 00

 Loading...
Loading...







