D
D
C
C
S
S
8
8
1
1
0
0
V
V
2
2
D
D
i
i
g
g
i
i
t
t
a
a
l
l
D
D
C
C
S
S
e
e
r
r
v
v
o
o
D
D
r
r
i
i
v
v
e
e
r
r
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 42 Website: www.leadshine.com
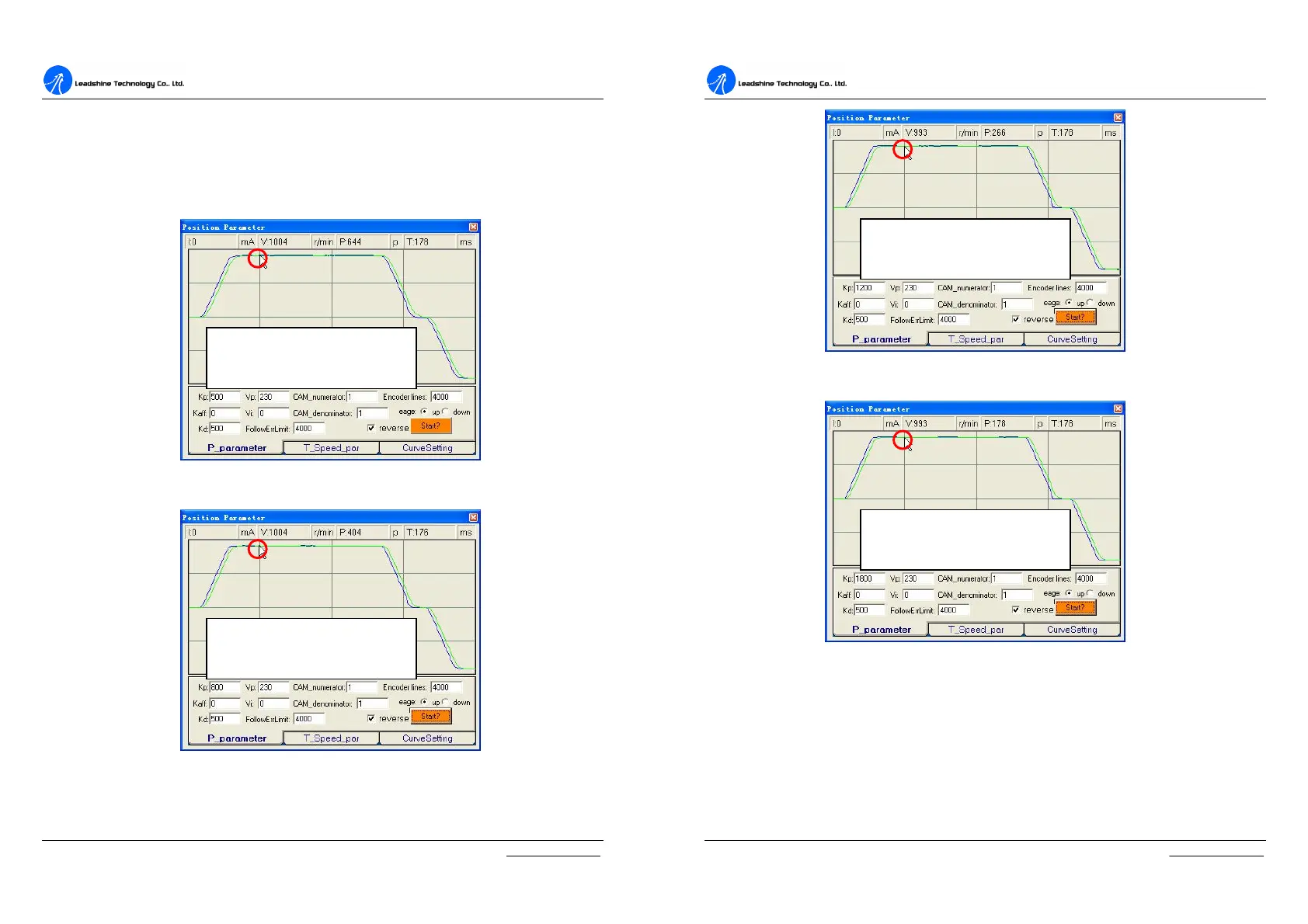
Step 3: Increase Kp to maximize the system stiffness until motor noise/vibration
begins, following the same way as Vp. See figure 6-29, 6-30, 6-31 and 6-32. The
motor shaft or load is stiff enough at standstill when we increase Kp to 1800 and the
motor noise/vibration can be accepted.
Figure 6-29: Increase Kp to 500 for quick response
Figure 6-30: Increase Kp to 800 for quick response
Kp = 500
Position following error = 644
Kp = 800
Position following error = 404
D
D
C
C
S
S
8
8
1
1
0
0
V
V
2
2
D
D
i
i
g
g
i
i
t
t
a
a
l
l
D
D
C
C
S
S
e
e
r
r
v
v
o
o
D
D
r
r
i
i
v
v
e
e
r
r
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 43 Website: www.leadshine.com
Figure 6-31: Increase Kp to 1200 for quick response
Figure 6-32: Increase Kp to 1800 for quick response
Now the system has been basically tuned. In the following step, the user can
increase Kaff to further reduce the position following error if necessary.
Step 4: Increase Kaff to 5000 and 10000. The position following error reduces to
132 and 86, respectively. See figure 6-33 and 6-34.
Kp = 1200
Position following error = 266
Kp = 1800
Position following error = 178