S94P01C -e1
66
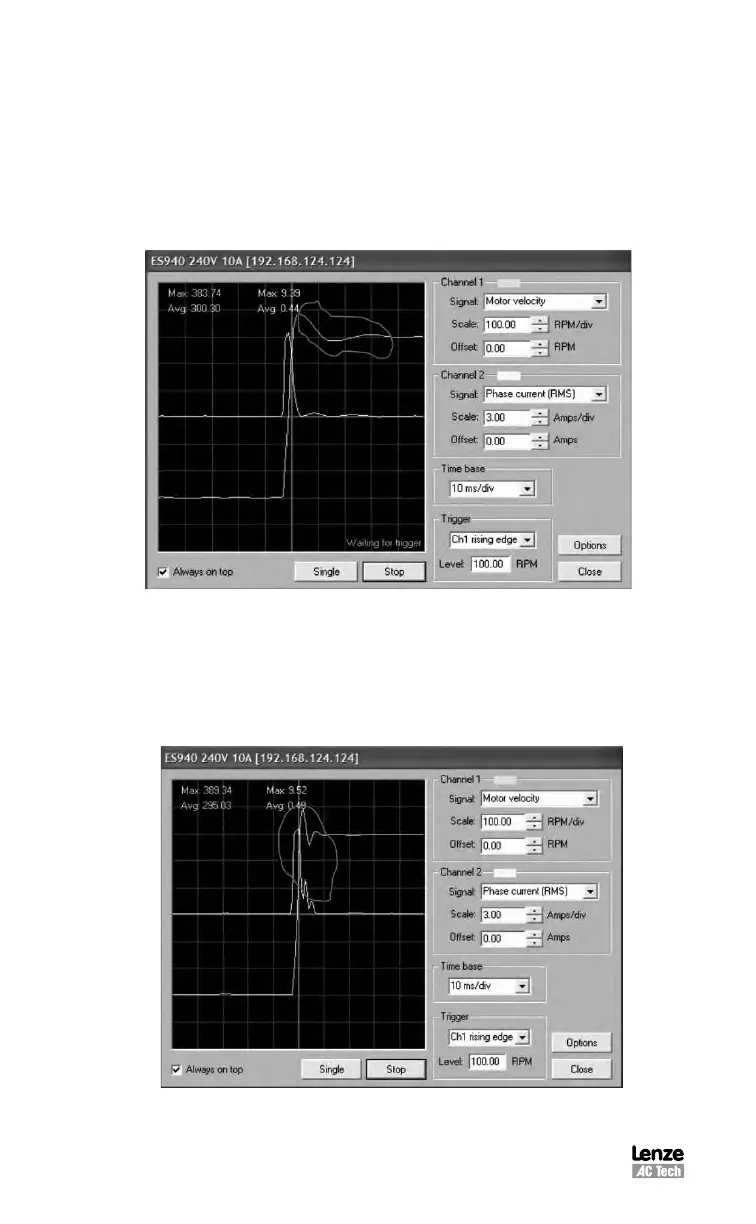
9.1.3 Abnormal Gains (velocity mode)
Velocity I-Gain is too high
Velocity P-gain = 18000
Velocity I-gain = 12000
Gain Scaling
= -1
Notice below that there is a large overshoot and a noticeable oscillation in the flat
portion of the Motor Velocity waveform. The current waveform also has a small trace
of instabilities at the flat portion of the waveform.
S940
Velocity P-gain is too high
Velocity P-gain = 22720
Velocity I-gain = 20
Gain Scaling = 0
Notice below that there is a large overshoot and a noticeable oscillation in flat portion
of the Motor Velocity waveform. The current waveform also has some instability on
trailing edge of the current impulse response.
S941
 Loading...
Loading...


