During operation
6-3
BA9300SU EN 2.1
6.2.2 Controller protection by current derating
Valid for the types 9326 to 9332.
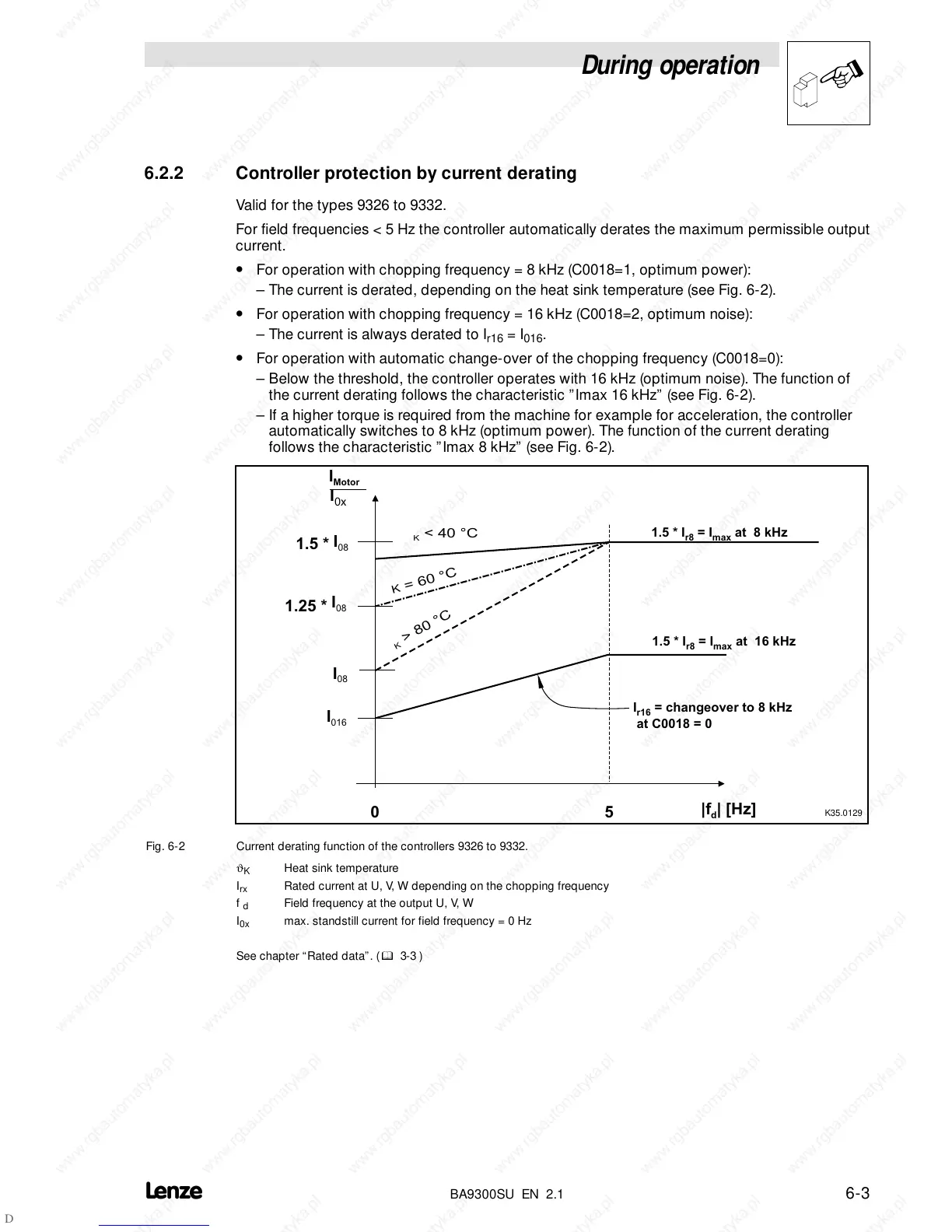
For field frequencies < 5 Hz the controller automatically derates the maximum permissible output
current.
• For operation with chopping frequency = 8 kHz (C0018=1, optimum power):
– The current is derated, depending on the heat sink temperature (see Fig. 6-2).
• For operation with chopping frequency = 16 kHz (C0018=2, optimum noise):
– The current is always derated to I
r16
=I
016
.
• For operation with automatic change-over of the chopping frequency (C0018=0):
– Below the threshold, the controller operates with 16 kHz (optimum noise). The function of
the current derating follows the characteristic ”Imax 16 kHz” (see Fig. 6-2).
– If a higher torque is required from the machine for example for acceleration, the controller
automatically switches to 8 kHz (optimum power). The function of the current derating
follows the characteristic ”Imax 8 kHz” (see Fig. 6-2).
K35.0129
|f
d
| [H z ]
05
J
K
> 8 0 ° C
J
K
= 6 0 ° C
J
K
< 4 0 ° C
I
0x
1.5 *
I
08
1.25 *
I
08
I
08
I
016
I
Motor
1.5 * I
r8
= I
max
a t 8 k H z
I
r1 6
= changeover to 8 kH z
at C 0018 = 0
1.5 * I
r8
= I
max
a t 1 6 k H z
Fig. 6-2 Current derating function of the controllers 9326 to 9332.
ϑ
K
Heat sink temperature
I
rx
Rated current at U, V, W depending on the chopping frequency
f
d
Field frequency at the output U, V, W
I
0x
max. standstill current for field frequency = 0 Hz
See chapter “Rated data”.(
^
3-3 )