In addition to the load sensing function, HPR-02 pumps with H1L-controller offer the possibility of overriding the ∆p LS-signal
hydraulically. This enables either a so called mode control for selecting different operation points or establish a power limit regula-
tion (underspeed control). The integration of all functions in the pump controller enables direct signal transfer without delay. The
controller-specific data are independent of the nominal pump size. The H1L-controller is particularly useful for tandem configura-
tions of two HPR-02 pumps, in which the first is equipped with an E1L-controller. The second pump with H1L-controller uses the
resulting hydraulic signal of the first controller and follows the first pump’s actions (master-slave-configuration).
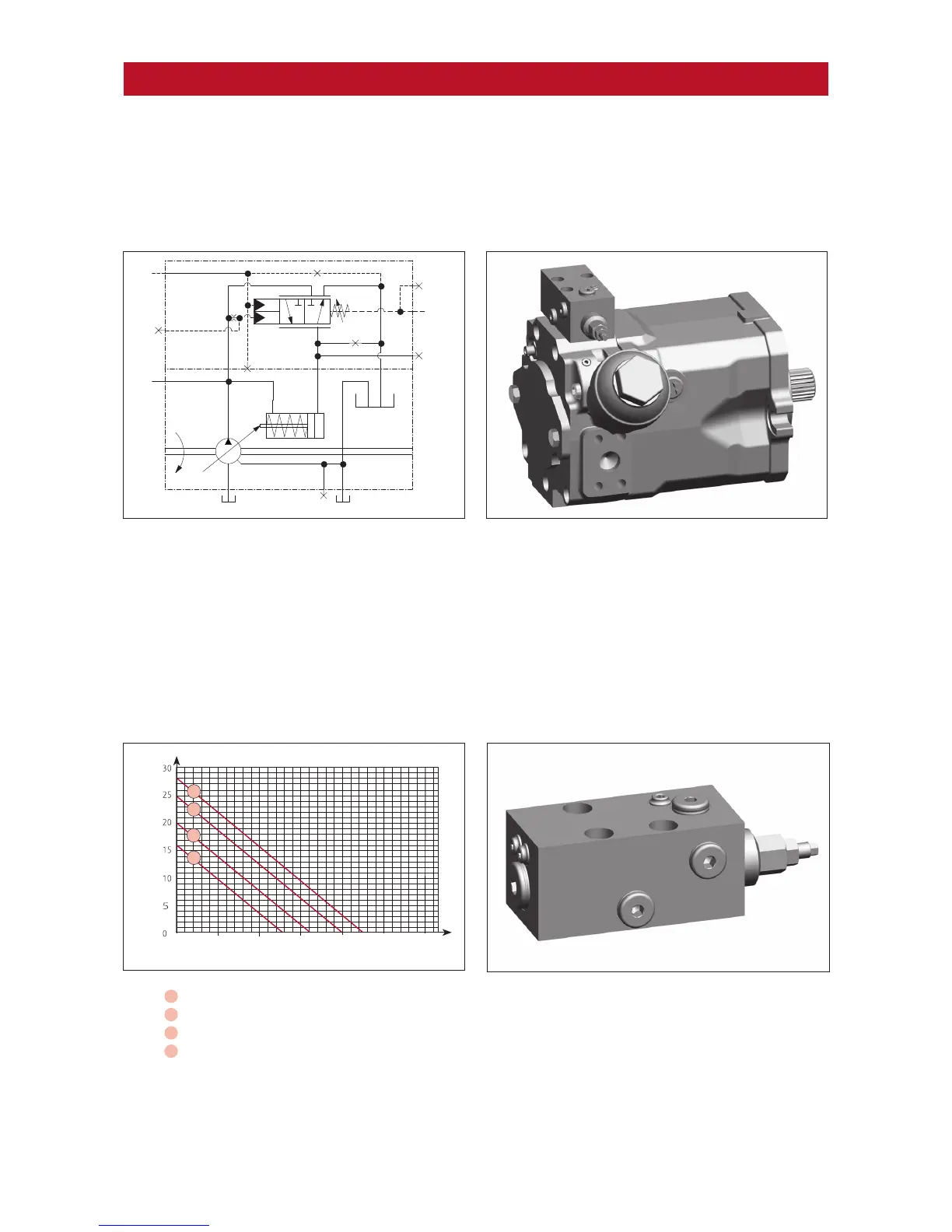
In the event of hydraulically overriding the LS-signal, a control pressure is applied to the port “A” of the controller. This pressure
acts proportionally against the LS-spring, and the LS signal is modulated accordingly. This causes the pump to swash back, thereby
reducing its output. The function between control pressure at the port A and the associated ∆p LS value is shown in the following
diagram.
H1L-controller