19 | P a g e
H. SumoBot
SumoBots use the ultrasonic sensor to seek and destroy another robot vehicle in the Sumo ring, while using the color
sensor to sense the white border and avoid falling off the edge.
H1. Basic Sumo Code
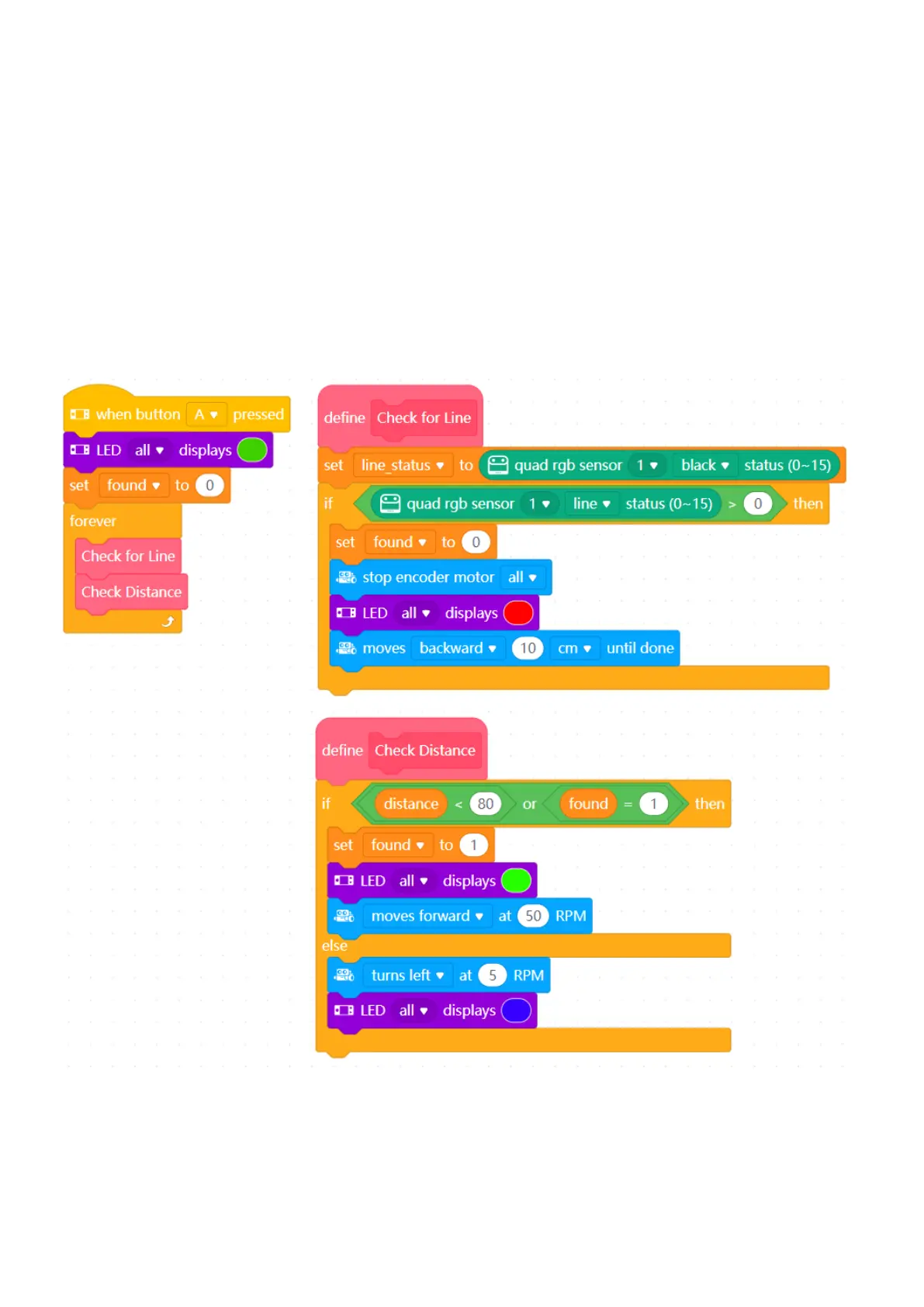
The basic actions of a SumoBot are:
• A three second wait before doing anything
• Move forward from the edge 20cm
• Rotate until the ultrasonic sensor locates the other vehicle (less than 80cm away)
• Drive full speed toward the other vehicle
• If the white edge is detected (high reflectance value) then stop, back up and rotate to locate the other
vehicle