10
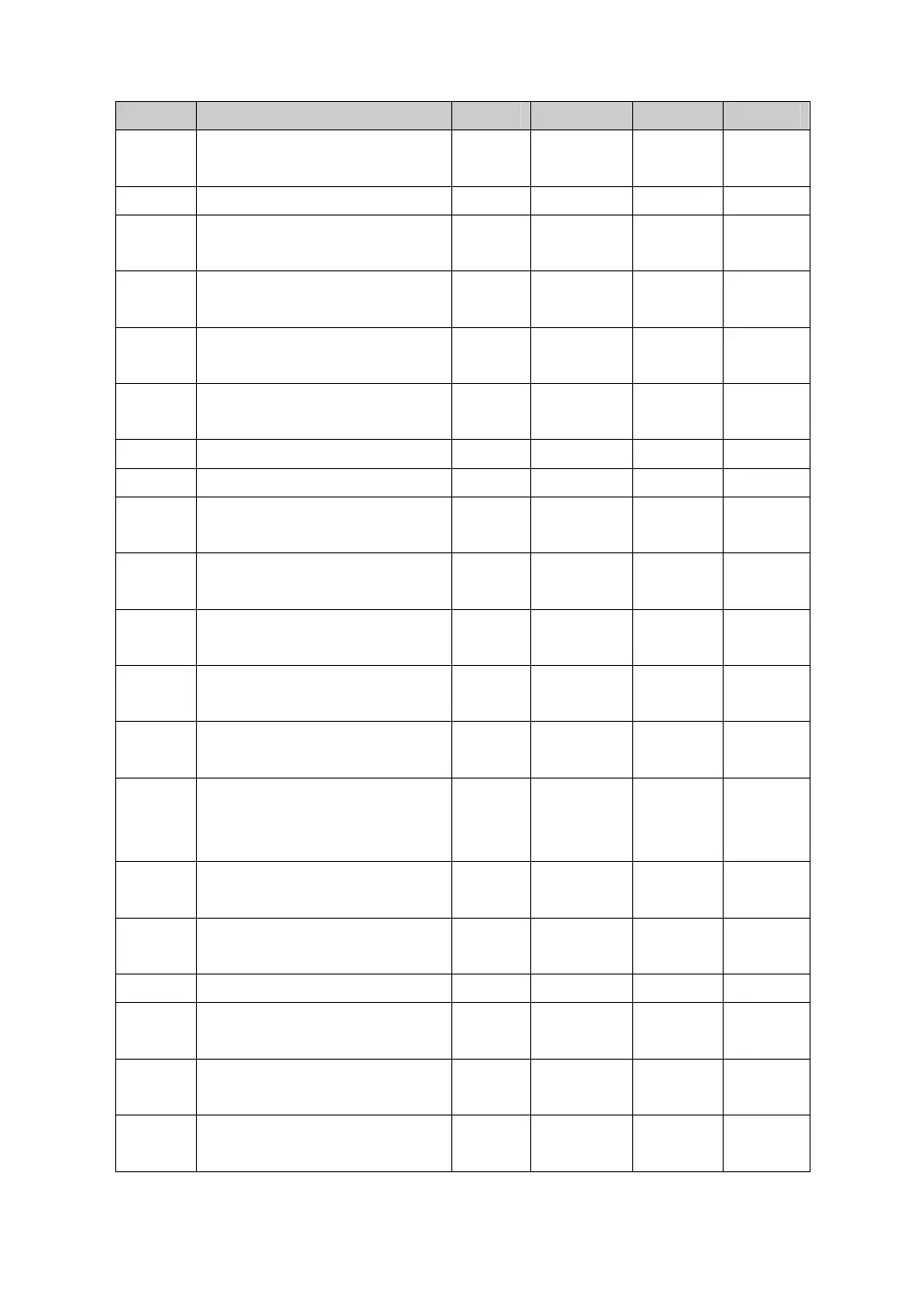
Ordinal Name Usage Range Default Unit
34 Internal torque limit in CCW
direction
P,S,T
0~300 300* %
35 Internal torque limit in CW direction
P,S,T
-300~0 -300* %
36 External torque limit in CCW
dire
ction
P,S,T
0~300 100 %
37 External torque limit in CW
direction
P,S,T
-300~0 -100 %
38 Trial running in speed mode; Torque
limit in JOG operation
S 0~300 100 %
39 Zero offset compensation of analog
torque command
T -2000~2000 0
40 Acceleration time constant S 1~10000 0 ms
41 Deceleration time constant S 1~10000 0 ms
42 S-curve acceleration/deceleration
time constant
S 1~1000 0 ms
43 Gain of analog speed command S 10~3000 300 (r/min) /
V
44 Reversing direction of analog speed
command
S 0~1 0
45 Zero offset compensation of analog
speed command
S -5000~5000 0
46 Time constant of filter for analog
speed command
S 0~1000 300 Hz
47 Action setting for electromagnetic
brake when servomotor is in
standstill
P,S,T
0~200 0
×10ms
48 Action setting for electromagnetic
brake when servomotor is in motion
P,S,T
0~200 50
×10ms
49 Action speed for electromagnetic
brake when servomotor is in motion
P,S,T
0~3000 100 r/min
50 Speed limit in torque control T 0~5000 3600* r/min
51 Electronic gear is available in
dynamic
P 0~1 0
52 Second numerator of frequency
divider for position command pulse
P 1~32767 1
53 Bottom four bits control word for
forcing the input terminal to be ON
P,S,T
0000~1111 0000 Binary