9
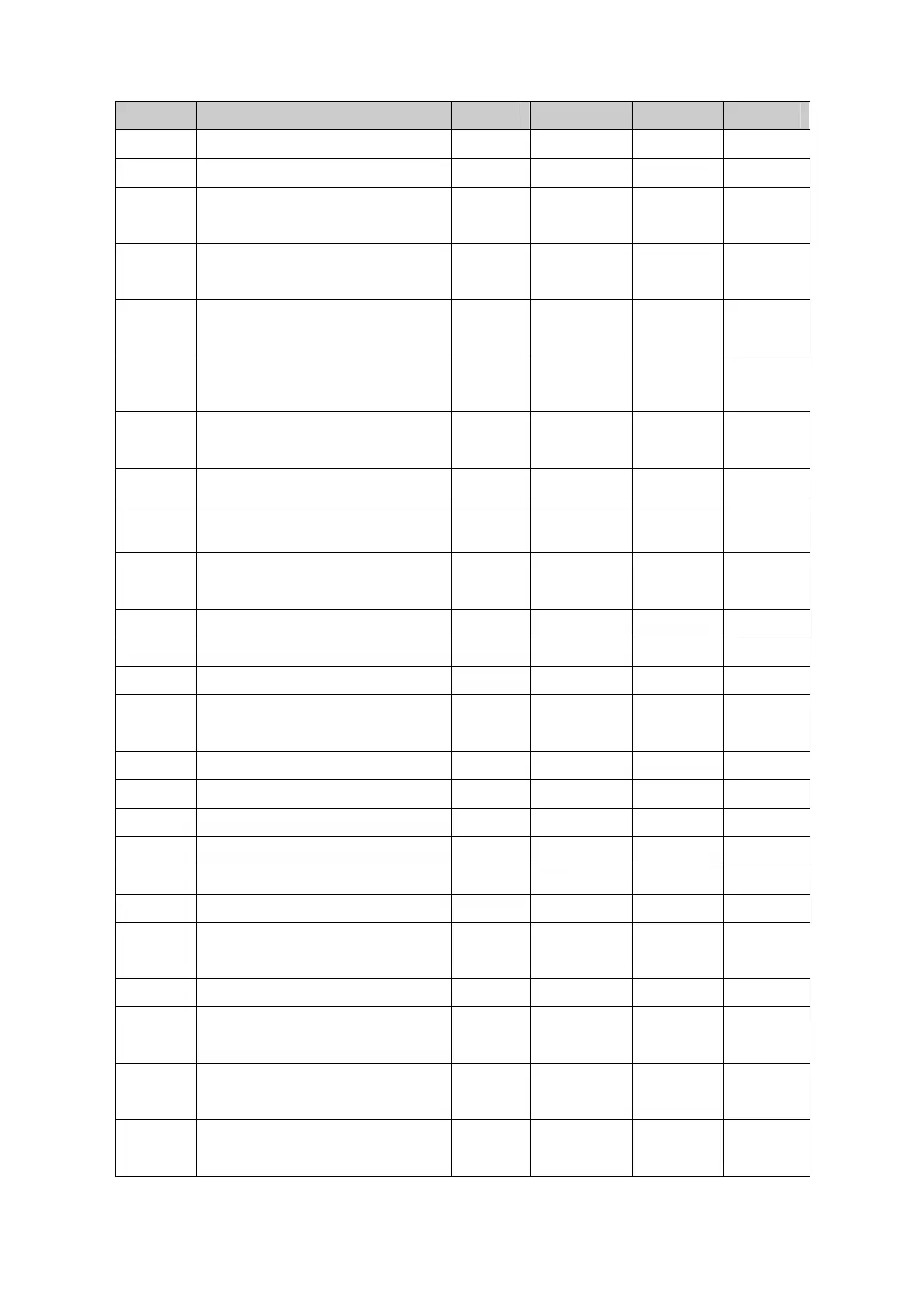
Ordinal Name Usage Range Default Unit
9 Proportional gain of position loop P 1~1000 40 1/s
10 Feed forward gain of position loop P 0~100 0 %
11 Cut-off frequency of feed forward
filter for position loop
P 1~1200 300 Hz
12 Numerator of frequency divider for
position command pulse
P 1~32767 1
13 Denominator of frequency divider
for
position command pulse
P 1~32767 1
14 Input mode of position command
pulse
P 0~2 0
15 Reversing direction of position
com
mand pulse
P 0~1 0
16 Positioning completed range P 0~30000 20 pulse
17 Position deviation limit for error
detection
P 0~30000 400
×100
pulse
18 Neglect excessive position deviation P 0~1 0
19 Smooth filter for position command P 0~30000 0 0.1ms
20 Neglect drive inhibition inputs
P,S,T
0~1 0
21 JOG running speed S -3000~3000 120 r/min
22 Internal/external speed command
selection
S 0~2 1
23 Maximum speed limit
P,S,T
0~4000 3600 r/min
24 Internal speed 1 S -3000~3000 0 r/min
25 Internal speed 2 S -3000~3000 100 r/min
26 Internal speed 3 S -3000~3000 300 r/min
27 Internal speed 4 S -3000~3000 -100 r/min
28 Arrival speed S 0~3000 500 r/min
29 Input gain of analog torque
command
T 10~100 30 0.1V/100
%
30 Alarm level of torque overload
P,S,T
1~300 300 %
31 Detection time for torque overload
alarm
P,S,T
0~32767 0 ms
32 Permission of control mode
exchange
P,S,T
0~1 0
33 Inversing direction of analog torque
command
T 0~1 0