Section 3 - Screen Overview and Operation
90-8M0087257 eng DECEMBER 2014 Page 33
5. Press the arrow button to highlight the target you want to change—RPM window minimum or RPM window maximum, and
press the enter button.
6. Press the arrow buttons to change the individual numbers (X000). Press the enter button to save that number and move to
the next number (0X00), use the arrow buttons to change this number.
7. When the last number (000X) has been changed, press the enter button.
NOTE: The settings menu will close after pressing the enter button. To change other target values, press the pages button,
settings will be the icon that is highlighted. Follow the same process as previously outlined to change other target values.
Smart Tow Mode
Smart Tow
Smart Tow is based on the engine RPM unless the vessel has a GPS installed and connected to the control area network.
When the vessel contains a GPS, you can select either speed targets or engine RPM targets for Smart Tow control options.
You can also create custom launch profiles.
Smart Tow Targets
Smart Tow will modify the constant data area by incorporating RPM and overshoot indicators within the RPM sweeps. The
RPM set point target will be the color orange and the overshoot scale will be the color white.
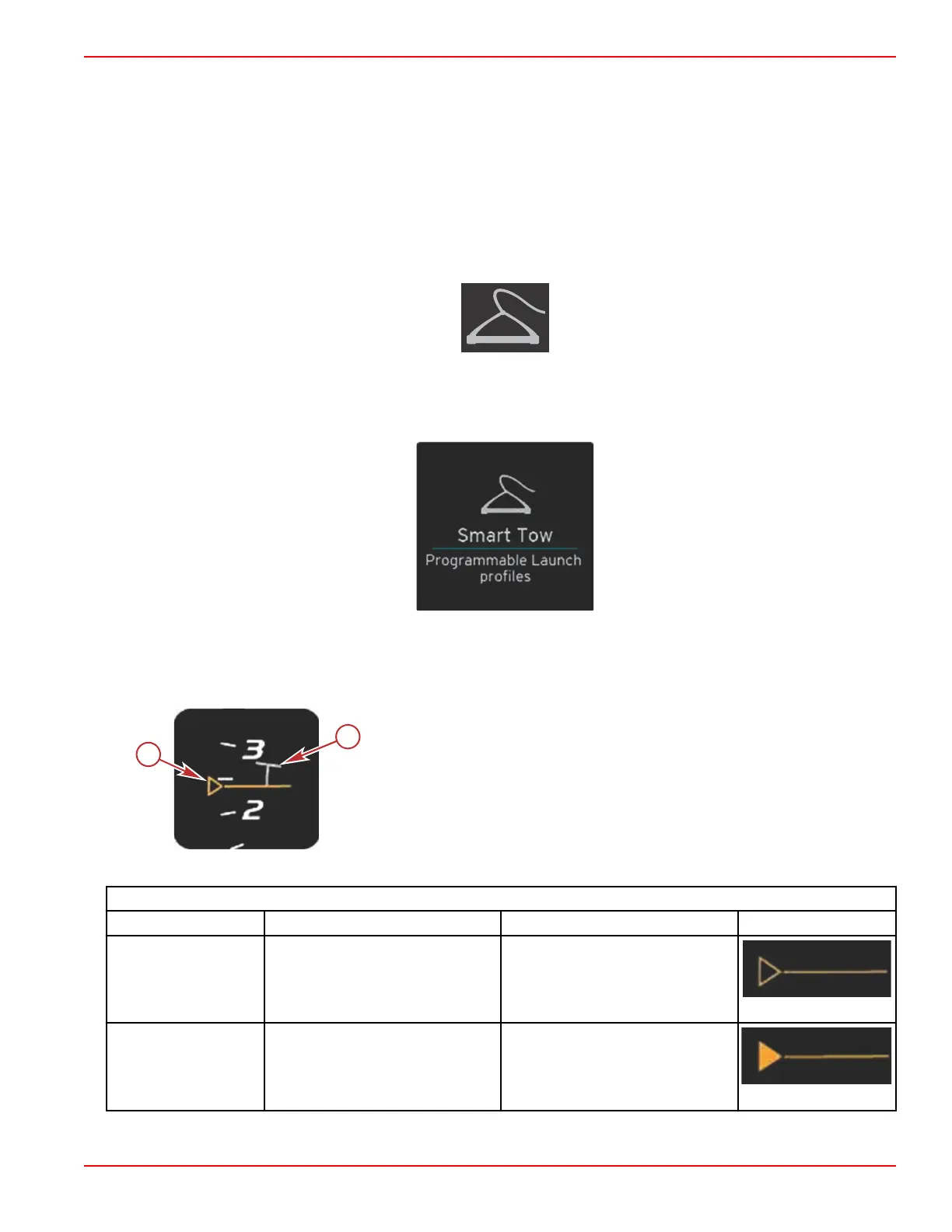
a - RPM set point target
b - Overshoot scale
The RPM set point target will change from an outline when not active, to a solid when activated.
RPM Set Point Target
State Color File value Image
Set‑point Orange Outline
Active Orange Solid
 Loading...
Loading...





