7 Appendix
Safety diagnosis function (test pulse diagnosis) Appendix-107
Appendix 3: Safety diagnosis function (test pulse diagnosis)
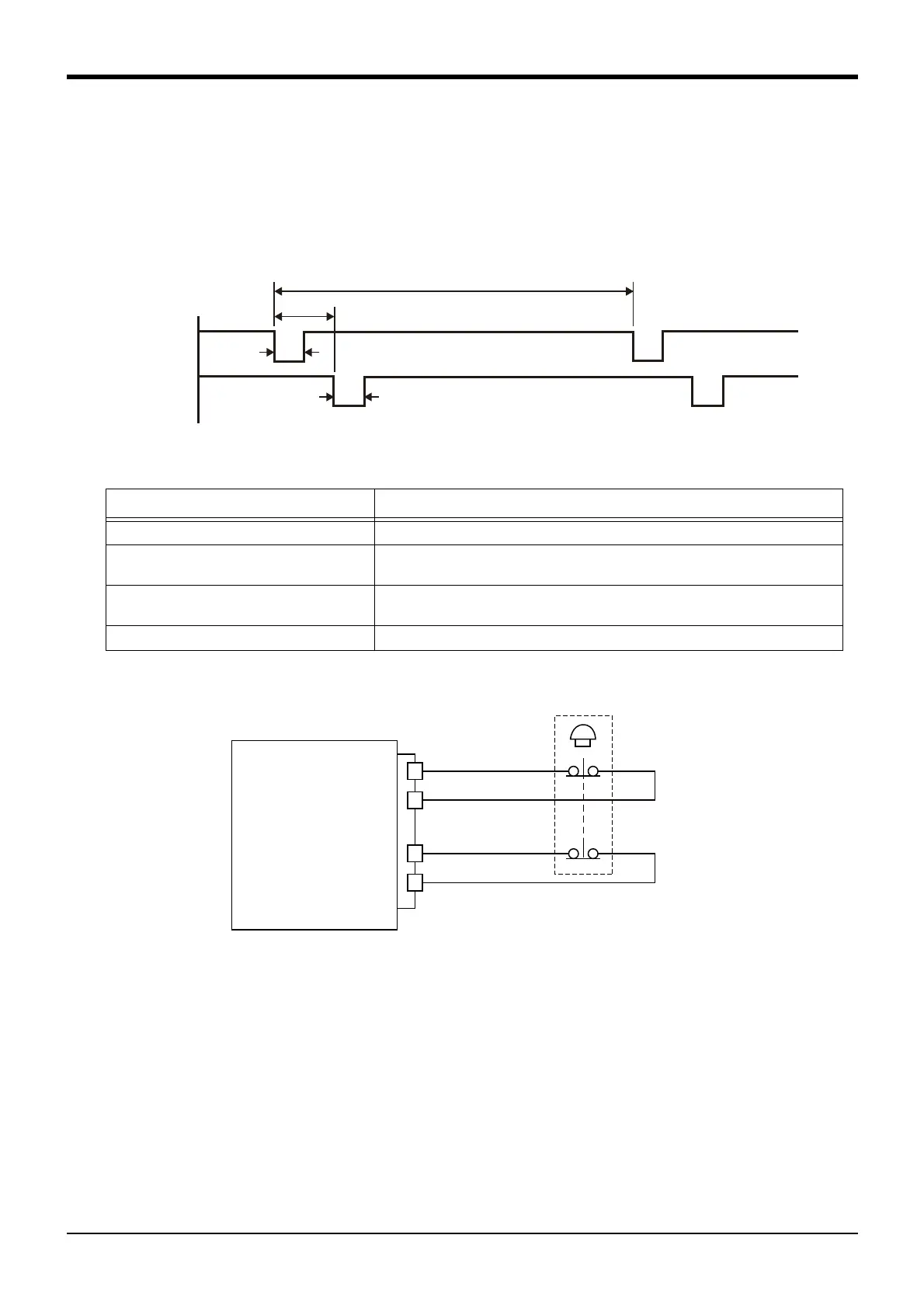
The Safety diagnosis function checks the emergency stop status of the robot using the pulse output from the
emergency stop signals (EXTEMG11, EXTEMG21). By changing the settings of TPOEMG, off pulses can be
output regularly from EXTEMG11 and EXTEMG21. The width of the pulses that are output is approximately
20 ms. By checking the robot controller test pulses regularly, it is possible to ascertain whether the emer-
gency stop line is working properly.
When using this function, connect emergency stop switches by seeing Fig. 7-2.
Make sure to prevent test pulses of this function from causing faulty operation of peripheral devices.
Fig.7-1: Test pulse diagnosis
Table 7-2: Parameter details
Fig.7-2: How to wire emergency stop lines
Item Description
Parameter name TPOEMG
Function This enables configuring the pulse output function for outputting test pulse signals
from emergency stop ports (EXTEMG11, EXTEMG21).
What parameter settings means 0: Outputs no test pulses
1: Outputs test pulses
Default 0
㻱㼄㼀㻱㻹㻳㻝㻝
㻭㼜㼜㼞㼛㼤㻚㻌㻝㻜㻜㻜㼙㼟
㻭㼜㼜㼞㼛㼤㻚
㻞㻜㼙㼟
㻭㼜㼜㼞㼛㼤㻚
㻞㻜㼙㼟
㻭㼜㼜㼞㼛㼤㻚
㻠㻜㼙㼟
㻱㼄㼀㻱㻹㻳㻞㻝
㻾㼛㼎㼛㼠㻌㼏㼛㼚㼠㼞㼛㼘㼘㼑㼞
㻱㼙㼑㼞㼓㼑㼚㼏㼥㻌㼟㼠㼛㼜㻌㼟㼣㼕㼠㼏㼔㼑㼟㻌㻔㻞㻌㼏㼛㼚㼠㼍㼏㼠㼟㻕
㻱㼄㼀㻱㻹㻳㻝㻝
㻱㼄㼀㻱㻹㻳㻝㻞
㻱㼄㼀㻱㻹㻳㻞㻝
㻱㼄㼀㻱㻹㻳㻞㻞
㻯㻺㼁㻿㻾㻝㻝
㻝㻠
㻟㻜
㻣
㻞㻟

 Loading...
Loading...


