3 Controller
Emergency stop input and output etc. 3-65
(1) Automatic Operation/Jog Operation/Brake Release and Necessary Switch Settings
The following is a description of various operations performed on the robot and switch settings that are
required.
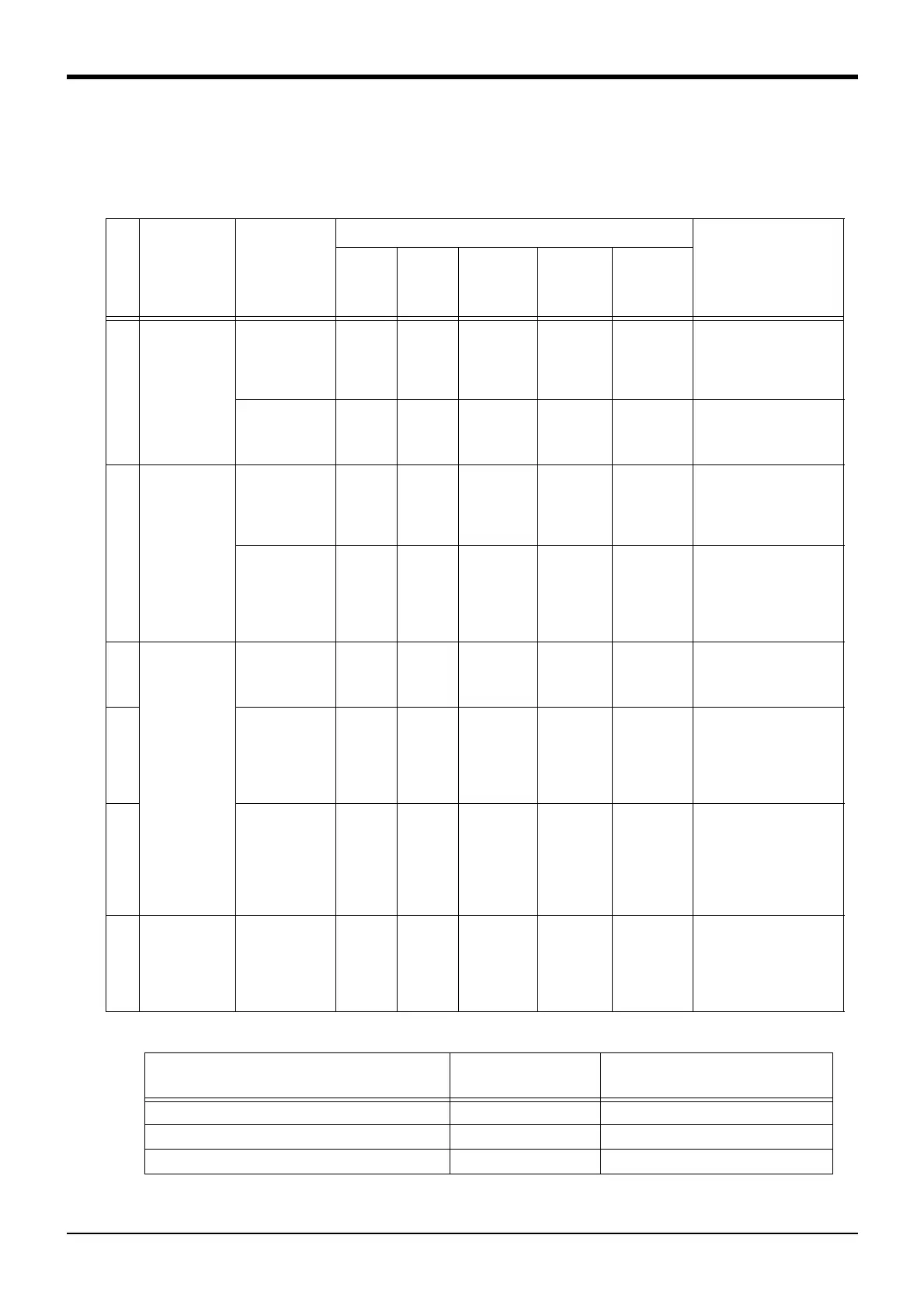
Table 3-7: Various operations and necessary switch settings
No
Operation
Note1)
Note1) Regardless of the operation mode or the input terminal status indicated in Table 3-7, the possible statuses of the robot in collab-
orative operation mode are indicated in the table below.
Method of
operation
Related switch settings
Note1)
Note2)
Description
T/B
enable/
disable
T/B
enable
switch
Mode
selector
switch input
terminal
Door switch
input
terminal
Safety input
1
1 Jog operation T/B Enable ON Open
(MANUAL
mode)
- - If the mode selector
switch input is set to Open
(MANUAL mode), the
state of door switch input
does not matter.
RT VisualBox
RT ToolBox3
Disable - Close
(AUTO-
MATIC
mode)
Close
(Door
Close)
- The door switch input
status must be "closed"
(door closed).
2 Brake release
Note3)
T/B Enable ON Open
(MANUAL
mode)
- - If the mode selector
switch input is set to Open
(MANUAL mode), the
state of door switch input
does not matter.
RT VisualBox Disable - Close
(AUTO-
MATIC
mode)
- - If the door switch input is
set to Open (door
opened), the error H0040
(Door Switch Signal is
Input) will occur, but the
brakes can be released.
3 Automatic
operation
T/B
RT VisualBox
RT ToolBox3
Disable - Close
(AUTO-
MATIC
mode)
Close
(Door
Close)
- The door switch input
status must be "closed"
(door closed).
4 Operation
buttons
Disable - Close
(AUTO-
MATIC
mode)
Close
(Door
Close)
Open
(collaborative
operation)
The door switch input
status must be "closed"
(door closed).
Safety input 1 must be set
to "Open" (collaborative
operation).
5 T/B Enable ON Open
(MANUAL
mode)
- - If the mode selector
switch input is set to Open
(MANUAL mode) and
automatic operation is
performed, the robot will
operate at the safe speed
(250 mm/s) or less.
6 Direct teaching Operation
buttons
RT VisualBox
RT ToolBox3
Disable - Close
(AUTO-
MATIC
mode)
Close
(Door
Close)
Open
(collaborative
operation).
The door switch input
status must be "closed"
(door closed).
Safety input 1 must be set
to "Open" (collaborative
operation).
Collaborative operation mode Safety input 1
Location of the robot relative to the low-
speed space
High-speed operation mode Close -
Collaborative operation mode (Standard operation) Open Outside the space
Collaborative operation mode (Low-speed operation) Open Inside the space

 Loading...
Loading...


