Appendix-118 Connections of recommended hands, recommended vision sensors and the force sensor
7 Appendix
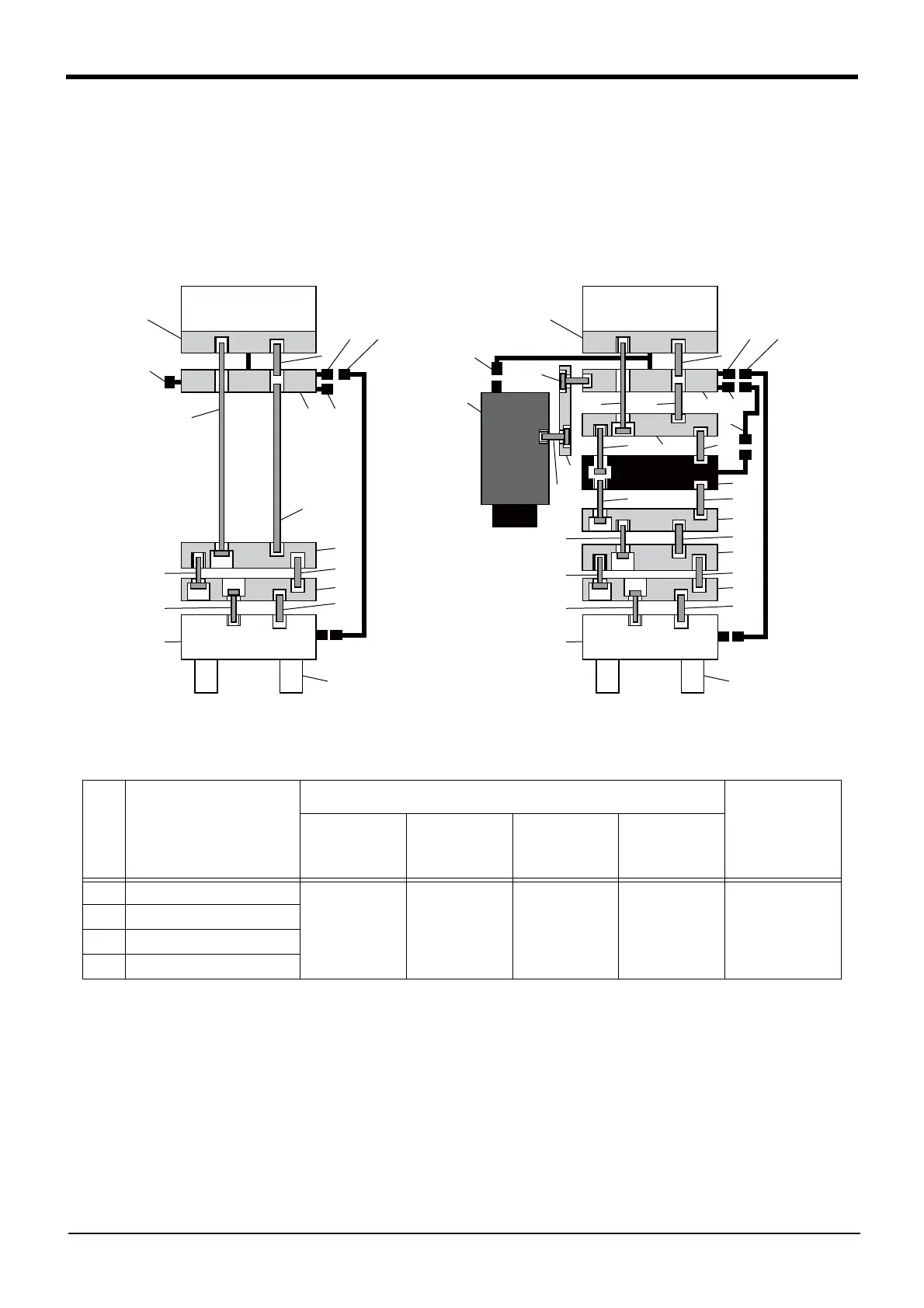
(3) Hand: KIT-ASSISTA-G (Manufactured by GIMATIC)
Fig. 7-10 shows the connection details of a hand, vision sensor, and force sensor.
The items required depend on which devices are used.
Table 7-5 lists the items required for using each device. Purchase the relevant options. For details on the
steps of mounting devices, refer to their Instruction Manuals.
Fig. 7-11 shows the overall view of the robot with a hand and vision sensor mounted.
Fig. 7-12 shows the wiring of a hand and vision sensor to the robot.
Fig.7-10: Connection details of the hand (KIT-ASSISTA-G)
Table 7-5: List of the items required to use the hand (KIT-ASSISTA-G), vision sensor, and force sensor
No. Name
Device used (○: Required, -: Not required)
Model
Hand only
Hand and vision
sensor
Hand and force
sensor
Hand, vision
sensor, and
force sensor
1 Mechanical interface
○○○○
-
(End of the robot
arm)
2 Hand connector cable
3 Vision sensor connector cable
4 Force sensor connector cable
1
1
19
7
2 16
7
4
2 16
4
8
12
10
15
17
56
3
3
20
9
11
13 13
14
5
23
22
6
21
18
27
26
24
28
9
3029
25
31
When a hand is mounted
When a hand, vision sensor, and force
sensor are mounted
8
12
10
15
17
11
14

 Loading...
Loading...


