1 - 5
1. FUNCTIONS AND CONFIGURATION
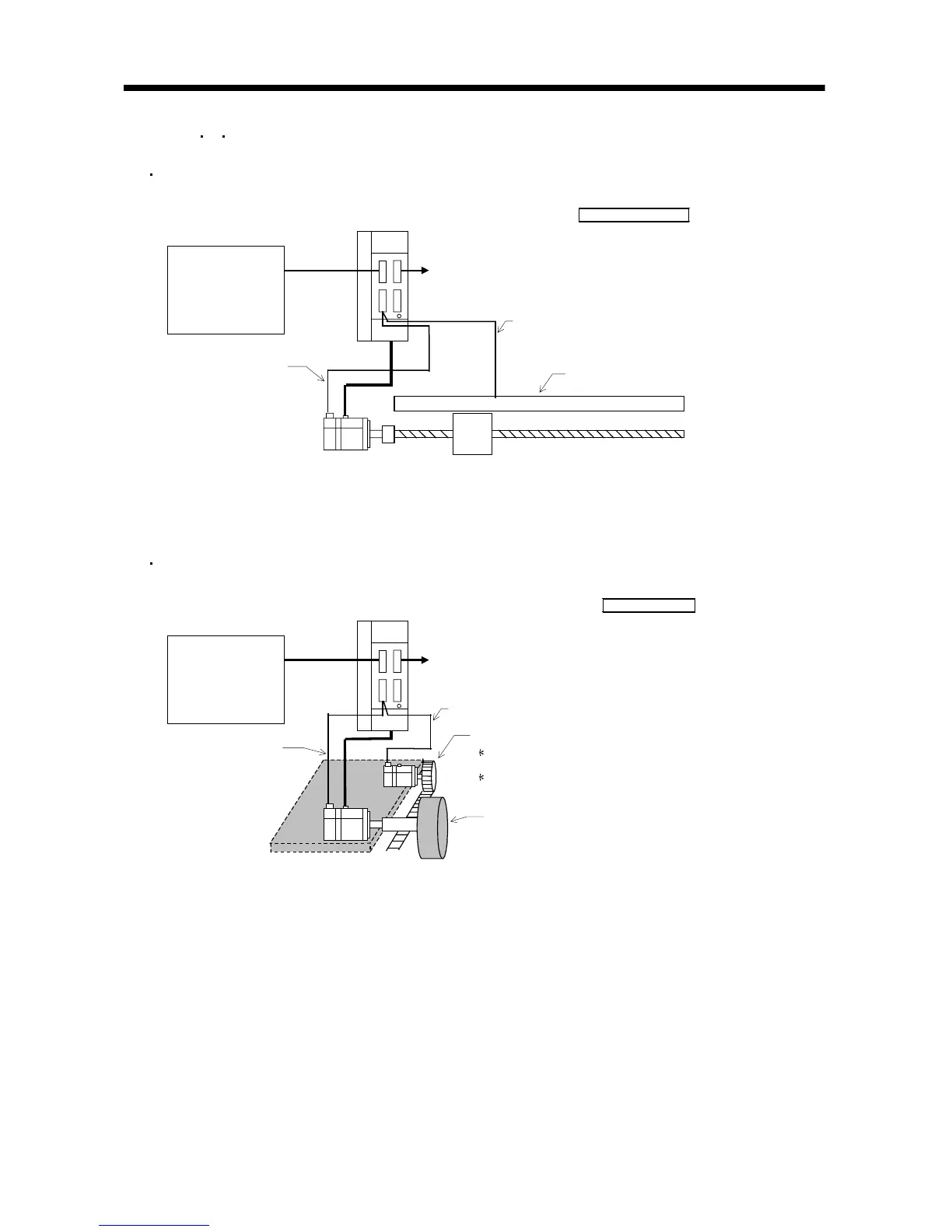
(2) When A B Z differential input interface unit (MR-J2S-CLP01) is not used
System configuration example 3 (when serial communication-specified linear scale is used)
SSCNET controller
Servo amplifier
Position
command
control
signal
CN2
SSCNET
Encoder signal
Linear scale
Serial communication signal cable
Servo motor
To other axis
Serial I/F linear scale
Note 1. When an ABS type linear scale is used, this example is compatible with an absolute position detection system. Note that
the battery (MR-BAT) is not needed.
System configuration example 4 (when serial communication-specified servo motor is used)
SSCNET controller
Servo amplifier
Position
command
control
signal
CN2
SSCNET
Encoder signal
Drive section
Serial communication signal cable
Driving servo
motor
To other axis
Serial I/F encoder
Position detection section (detecting servo
motor and pulley)
Use the HC-MFS/KFS series servo motor.
(131072p/rev resolution)
No compatibility with absolute position
detection.
Note 1. Use the HC-KFS series or HC-MFS series servo motor in the position detection section.
2. No compatibility with an absolute position detection system.
 Loading...
Loading...

