4. STARTUP
4 - 27
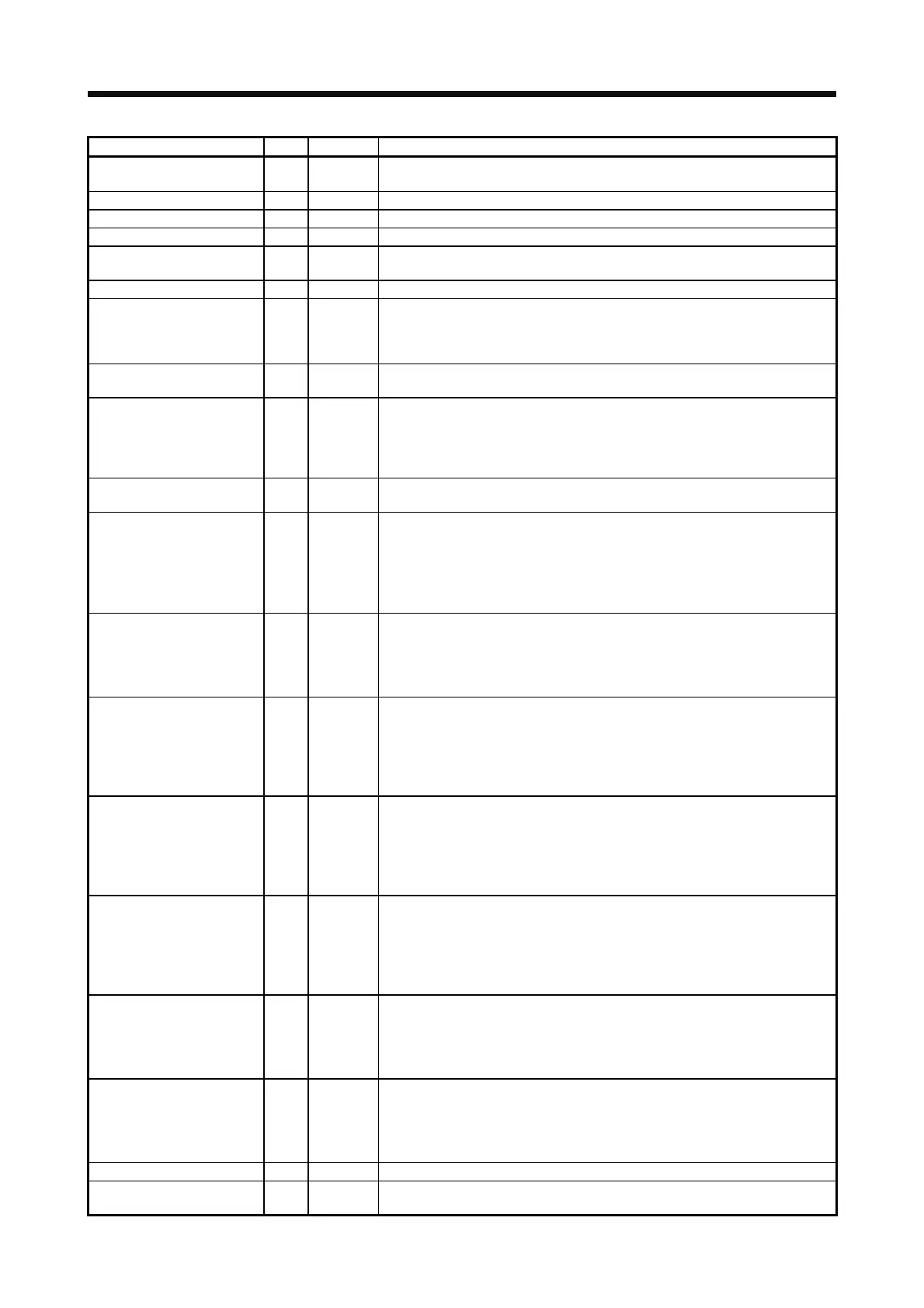
Status display Symbol Unit Description
Load to motor inertia ratio dC Multiplier
The estimated ratio of the load inertia moment to the servo motor shaft inertia
moment is displayed.
Bus voltage Pn V The voltage of main circuit converter (between P+ and N-) is displayed.
Encoder inside temperature ETh °C Inside temperature of encoder etected by the encoder is displayed.
Settling time ST ms Settling time is displayed. When it exceeds 1000 ms, "1000" will be displayed.
Oscillation detection
frequency
oF Hz Frequency at the time of oscillation detection is displayed.
Number of tough operations Td times The number of tough drive functions activated is displayed.
Unit power consumption 1
(increment of 1 W)
PC1 W
Unit power consumption is displayed by increment of 1 W. Positive value indicate
power running, and negative value indicate regeneration. The values in excess of
±99999 can be counted. However, the counter shows only the lower five digits of
the actual value since the servo amplifier display is five digits.
Unit power consumption 2
(increment of 1 kW)
PC2 kW
Unit power consumption is displayed by increment of 1 kW. Positive value
indicate power running, and negative value indicate regeneration.
Unit total power consumption
1 (increment of 1 Wh)
TPC1 Wh
Unit total power consumption is displayed by increment of 1 Wh. Positive value is
cumulated during power running and negative value during regeneration. The
values in excess of ±99999 can be counted. However, the counter shows only
the lower five digits of the actual value since the servo amplifier display is five
digits.
Unit total power consumption
2 (increment of 100 kWh)
TPC2 100 Wh
Unit total power consumption is displayed by increment of 100 kWh. Positive
value is cumulated during power running and negative value during regeneration.
Load-side encoder
Cumulative feedback pulses
FC pulse
Feedback pulses from the load-side encoder are counted and displayed.
The values in excess of ±99999 can be counted. However, the counter shows
only the lower five digits of the actual value since the servo amplifier display is
five digits.
Press the "SET" button to reset the display value to zero.
The value of minus is indicated by the lit decimal points in the upper four digits.
Load-side encoder
Droop pulses
FE pulse
Droop pulses of the deviation counter between a load-side encoder and a
command are displayed. When the count exceeds ±99999, it starts from 0.
Negative value is indicated by the lit decimal points in the upper four digits.
The display shows the average droop pulses of 128 samplings at the rate of 444
[μs].
Load-side encoder
information 1
(1 pulse unit)
FCY1 pulse
The Z-phase counter of a load-side encoder is displayed in the encoder pulse
unit.
For an incremental linear encoder, the Z-phase counter is displayed. The value is
counted up from 0 based on the home position (reference mark). For an absolute
position linear encoder, the encoder absolute position is displayed.
When the count exceeds 99999, it starts from 0.
Load-side encoder
information 1
(100 pulses unit)
FCY2 100 pulses
The Z-phase counter of a load-side encoder is displayed by increments of 100
pulses.
For an incremental linear encoder, the Z-phase counter is displayed. The value is
counted up from 0 based on the home position (reference mark). For an absolute
position linear encoder, the encoder absolute position is displayed.
When the count exceeds 99999, it starts from 0.
Load-side encoder
information 2
FL5 rev
When an incremental linear encoder is used as the load-side encoder, the
display shows 0.
When an absolute position linear encoder is used as the load-side encoder, the
display shows 0.
When a rotary encoder is used as the load-side encoder, the display shows the
value of the multi-revolution counter.
Z-phase counter low FCY1 pulse
The Z-phase counter is displayed in the encoder pulse unit.
For an incremental linear encoder, the Z-phase counter is displayed. The value is
counted up from 0 based on the home position (reference mark). For an absolute
position linear encoder, the encoder absolute position is displayed.
When the count exceeds 99999, it starts from 0.
Z-phase counter high FCY2
100000
pulses
The Z-phase counter is displayed by increments of 100000 pulses.
For an incremental linear encoder, the Z-phase counter is displayed. The value is
counted up from 0 based on the home position (reference mark). For an absolute
position linear encoder, the encoder absolute position is displayed.
When the count exceeds 99999, it starts from 0.
Electrical angle low ECY1 pulse The servo motor electrical angle is displayed.
Electrical angle high ECY2
100000
pulses
The servo motor electrical angle is displayed by increments of 100000 pulses.
 Loading...
Loading...

