5 - 76
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
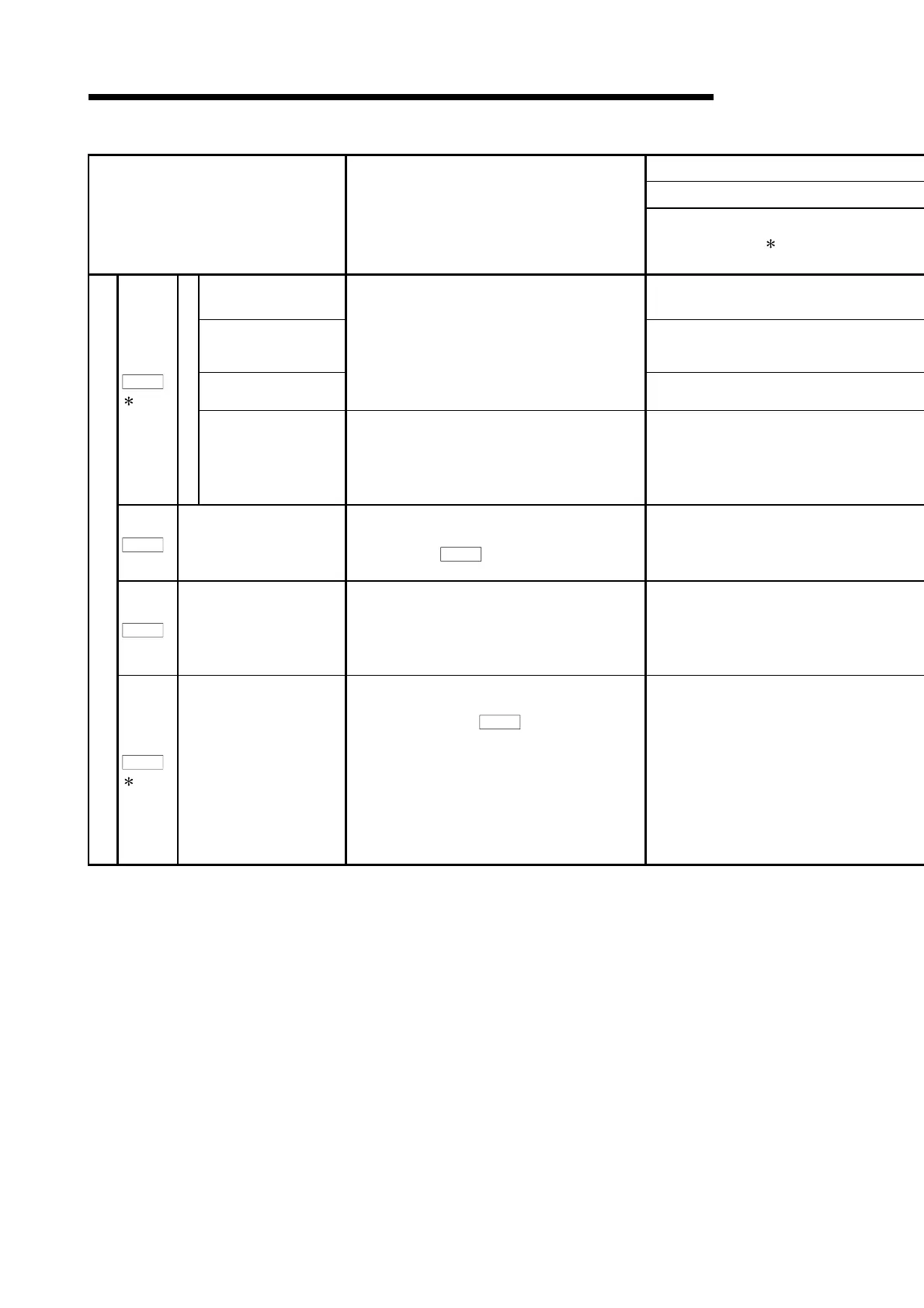
Item Setting details
Setting value
1
Serial communication
baud rate selection
0: 9600[bps] 2: 38400[bps]
1: 19200[bps] 3: 57600[bps]
Serial communication
response delay time
selection
0: Invalid
1: Valid (It answer after delay
time of more than 888
•
s)
Encoder output pulse
setting selection
A communication baud rate selection and
communication answer delay time and encoder output
pulse setup selection.
0: Output pulse setting selection
1: Divided perimeter ratio
Pr.133
2
Optional function 6
OPR set condition
selection
(Zeroing condition setting
selection)
A condition to execute the OPR set from servo system
controller is selection.
0: It is necessary to pass through
the Z phase after the power
on.
1: It is not necessary to pass
through the Z phase after the
power on.
Pr.134
PI-PID control switch-over
position droop
Used to select the position droop value (Number of
pulse) which PI control is switched over to PID control.
The parameter "
Pr.132
" becomes effective when a
parameter is made "0001
H
".
0 to 50000[PLS]
Pr.136
Speed differential
compensation
Used to select the differential compensation value.
Setting speed integral compensation value to 1000 in
PI (proportionally integral) control specifies the
ordinary P (proportional) control range, setting the
value to less than 1000 increase the P control range.
0 to 1000
Servo expansion parameters
Pr.138
2
Encoder output pulses
Used to set the encoder pulse (A-phase, B-phase)
output by the servo amplifier. (after the 4 times )
You can use parameter
Pr.133
to choose the output
pulse setting or output division ratio setting.
The number of A-phase and B-phase pulse actually
output 1/4 times greater than the present number of
pulse.
The maximum output frequency is 1.3Mpps (after
multiplication by 4). Use this parameter within this
range.
0 to 65535

 Loading...
Loading...