Rated current of the motor per it’s nameplate indication increased by 10%.
The voltage drop caused by the inverter leads to higher input current than
nominal. Make sure motor is capable of accepting increased current.
Rated frequency of the motor per its nameplate.
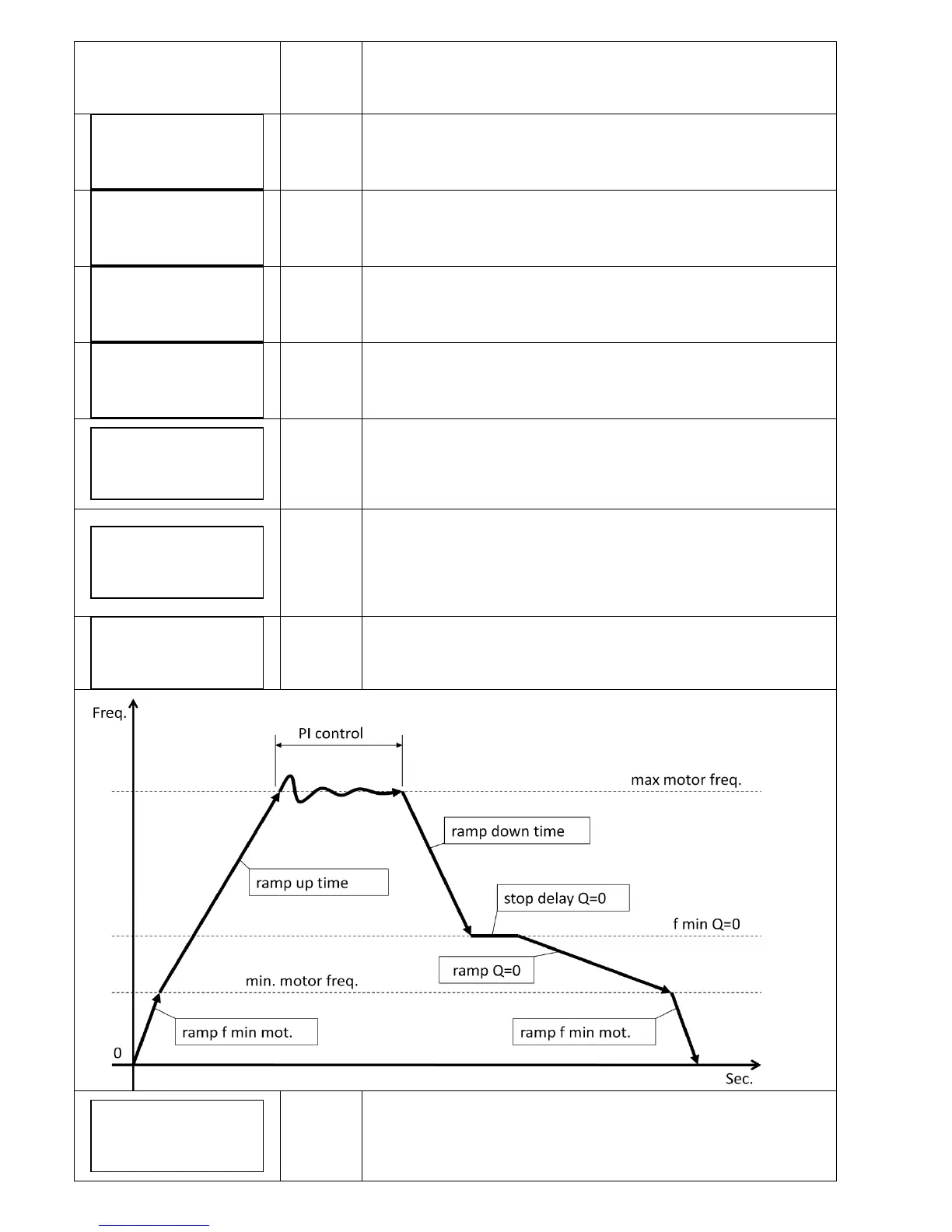
Maximum frequency of the motor. Note: by reducing the maximum
frequency of the motor, maximum current will be reduced as well.
Minimum frequency of the motor. Note: depends on the selected pump
type; for submersible pumps with water filled motors, is not advisable to set
minimum frequency lower than 30 Hz in order to protect the integrity of the
thrust bearings.
Ramp-up time to reach the speed required to achieve the set pressure (or
frequency value). Longer times delay the system reaching the preset value
but better protect system components.
Excessively long ramp-up times can create difficulties in VASCO setup, and
can also cause false overload alarms.
Ramp-down time to reach zero speed. Longer times keep the system
pressurized, while protecting the system components.
Excessively long ramp-down times can create difficulties in VASCO setup.
Excessively short ramp-down times can cause false overload alarms.
Time to reach the minimum frequency of the motor and vice versa.
When VASCO is used to control a water filled submersible motor it’s
important to keep this time at 1 second.
Carrier frequency (switching frequency).
It is possible to chose PWM in the range of 2.5 ,4, 6, 8, 10 kHz .
Higher values give a more sinusoidal wave with fewer losses. If long cables
are used (>20 m / >76 ft) (submersible pump) it is recommended to install an
inductive filter between VASCO and the motor (available upon request) and
Ramp f min mot.
t = XX [sec]
Ramp down time
t = XX [sec]
Ramp up time
t = XX [sec]
Min motor freq.
f = XXX [Hz]
Max motor freq.
f = XXX [Hz]
Rated motor freq
f = XXX [Hz]
Rated motor Amp.
I = XX.X [A]