307UM0200_01 May 2016 PD27x User Manual Page 12 of 30
ASB operates as follows: When ASB is disabled, the un-detect level is dependent on the sensivity setting of the
detector. Hence as the detector is made less sensitive, the un-detect level will reduce accordingly. When ASB is enabled
the un-detect level is xed irrespecve of the sensivity seng and will be equivalent to the un-detect level when the
sensivity is on maximum seng.
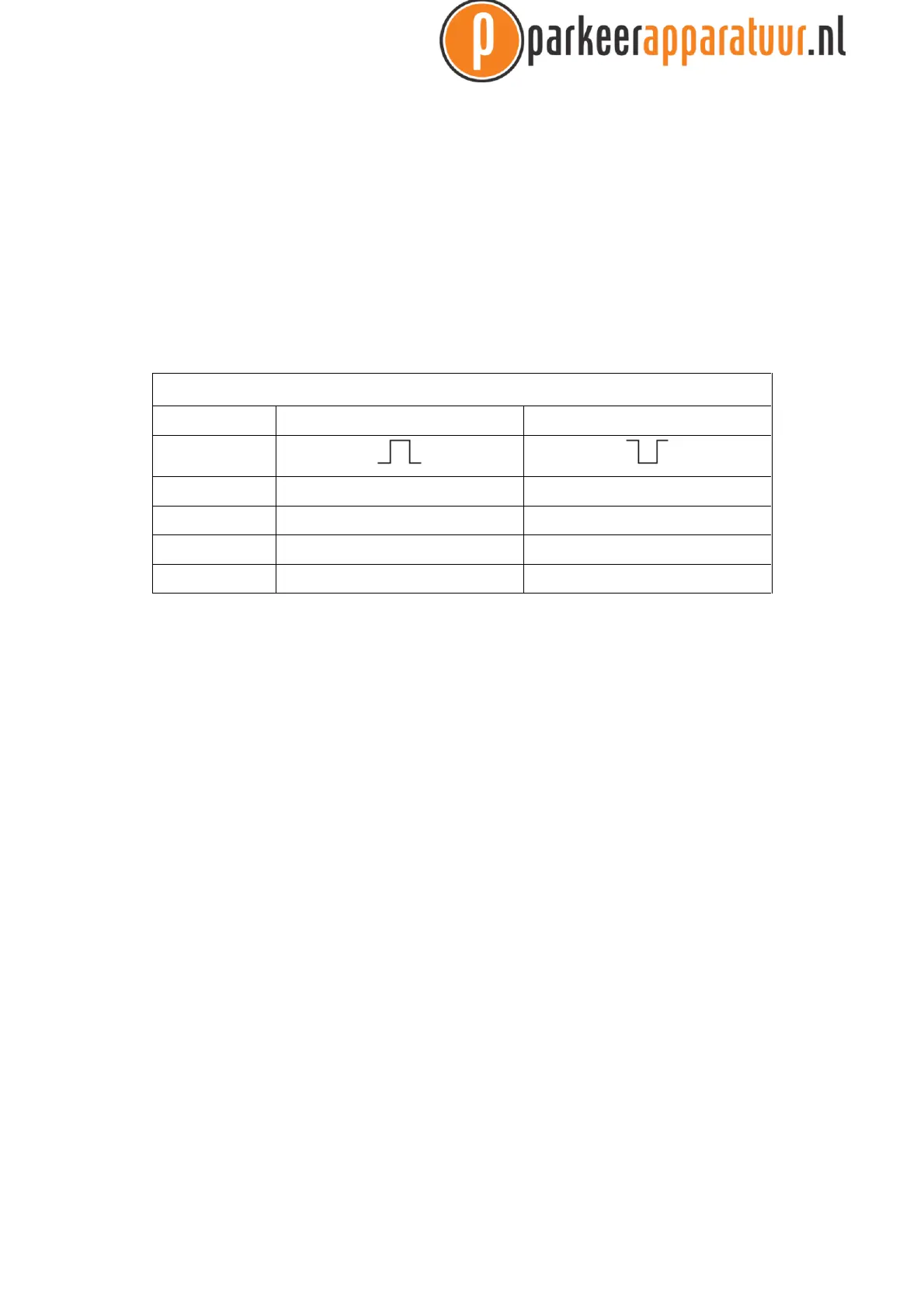
4.3 Types of Outputs
When a relay is congured as a presence output, it will produce a connuous output during the presence of a vehicle
over the inducve loop. When congured as a pulse output, the relay will output a pulse on detect according to the
pulse duraon seng.
For the PD27x both relays can be congured to operate as either a presence output relay or a pulse output relay, And
for both the user can select them to operate either is fail safe or fail secure mode.
Presence Relay Programming
Fail Secure Fail Safe
Relay
Un detect Closed Open
Detect Open Closed
Fault Closed Closed
Power O Closed Closed
Figure 5. Relay output configuration options
In fail-safe, the output is the same in detect as it is with no power applied to the unit. Either a valid detect situaon, or
a power failure/ fault will provide a signal. In fail-secure, the output is the same in un-detect as it is with no power
applied to the unit. Only a valid detect situation will provide a signal.
4.4 Response times
The response time of the detector is the time taken from when a vehicle moves over the loop to when the detector
gives an output.
The response mes of the PD27x have been adjusted to prevent false operaon in electrically noisy environments, but
retain adequate response to vehicles in parking and vehicle access control applicaons.
The response time will be proporonal to the level of sensitivity, the level of the detect and the speed of the vehicle. In
other words, a fast moving large detect will respond quicker than a slow moving small detect. Also, if the sensitivity is
set very low, the point at which it crosses the threshold will be later than higher sensivity sengs. At maximum
sensivity the response me is slower than other sensitivity levels to prevent false operation from noisy environments.
4.5 Powerfail
The PD27x is designed with a Powerfail feature that allows it to remember its operang condions and detect status in
the event of power being removed. When power is restored, the unit connues operang from its saved condions and
status. This is designed specifically for fail safe situations to retain the output state and prevent a glitch on the outputs
for a power failure. As such, when the power is restored the detector will not retune and will instead return to the
detect state prior to the power failure. If a vehicle was on the loop during the power failure, it will remain detected
when the power is restored. Thus it prevents the tuning out of a vehicle over the loop during a power failure.
The memory retenon of the vehicle is designed to be innite, but is subject to the following limitaons: