307UM0200_01 May 2016 PD27x User Manual Page 8 of 30
3. Operating Procedure
3.1 Hardware setup
The PD27x Series dual channel parking detector is designed to be DIN rail mounted, with the controls and visual
indicators at the front, and wiring at the rear of the enclosure. The power, loop and relay outputs are connected to the
11 pin relay base at back of the housing.
3.2 DIP Switch Selections
3.2.1 Presence (switch 10)
The presence seng determines how the detector tracks a detect. There are two
modes, permanent presence and limited presence.
Permanent presence mode is aimed at maintaining the presence of a vehicle over
the loop by connuously compensating for all environmental changes. This is used
in situaons where safety is involved and the detector is required to maintain the
detect unl the vehicle leaves the loop.
Limited presence is aimed at liming the presence of a vehicle over the loop. This
is used in situaons where stascs or control is involved and a vehicle parked over
the loop should not prevent connued operaon. The presence time is related to
the size of the detect. Typically a 1% ∆L/L will timeout aer approximately 1 hour.
3.2.2 Pulse on detect / Presence on detect (switch 9 and 8)
When a vehicle enters the loop the relay can either give a 150ms pulse on detect,
or give an output for the entire me that the vehicle is detected by the detector.
This seng can be made for each channel respectively as indicated on the
faceplate.
3.2.3 Fail-safe or Fail-secure (switch 7 and 6)
The relay output polarity of the presence relay can be switched between fail-safe
and fail-secure via the DIP switches.
In fail-safe, the output is the same in detect as it is with no power applied to the
unit. Related to an access control situaon, this is used in situaons where the loss of power must not lock people out.
Either a valid detect situation, or a power failure/ fault will provide a signal.
In fail-secure, the output is the same in un-detect as it is with no power applied to the unit. Related to an access control
situaon, this is used in situations where the loss of power must not allow free entry. Only a valid detect situaon will
provide a signal.
3.2.4 AB Logic (switch 5)
AB logic can be used to count the cars going in a specified direcon. A transion from loop 1 to loop 2 (classified as
forwards) results in a 150ms pulse output on Relay 1. A transion from loop 2 to loop 1 (classied as backwards) results
in a 150ms pulse output on Relay 2. This funcon can easily be switched off by making use of the DIP switches as
indicated on the tables.
3.2.5 Automatic Sensitivity Boost (ASB) (switch 4)
ASB is a mode which alters the un-detect level of the detector, and can be toggled on or o via the DIP switches. ASB
causes the sensivity level to be boosted to a maximum on detecon of a vehicle, irrespecve of current sensivity level
and maintained at this level during the enre presence of the vehicle over the loop. When the vehicle leaves the loop
and the detecon is lost, the sensitivity level reverts to the pre-selected level. This is typically used for vehicles with high
beds, or vehicles towing trailers, where it is important to not lose the detect over the entire length of the vehicle.
3.2.6 Automatic Frequency Selection (AFS) (switch 3)
This seng allows the detector to briey evaluate all ve frequency bands and select the best operang frequency
available. The tuning time with AFS switched on can range between 5 to 20 seconds. With AFS switched off, the
frequency can be selected manually.
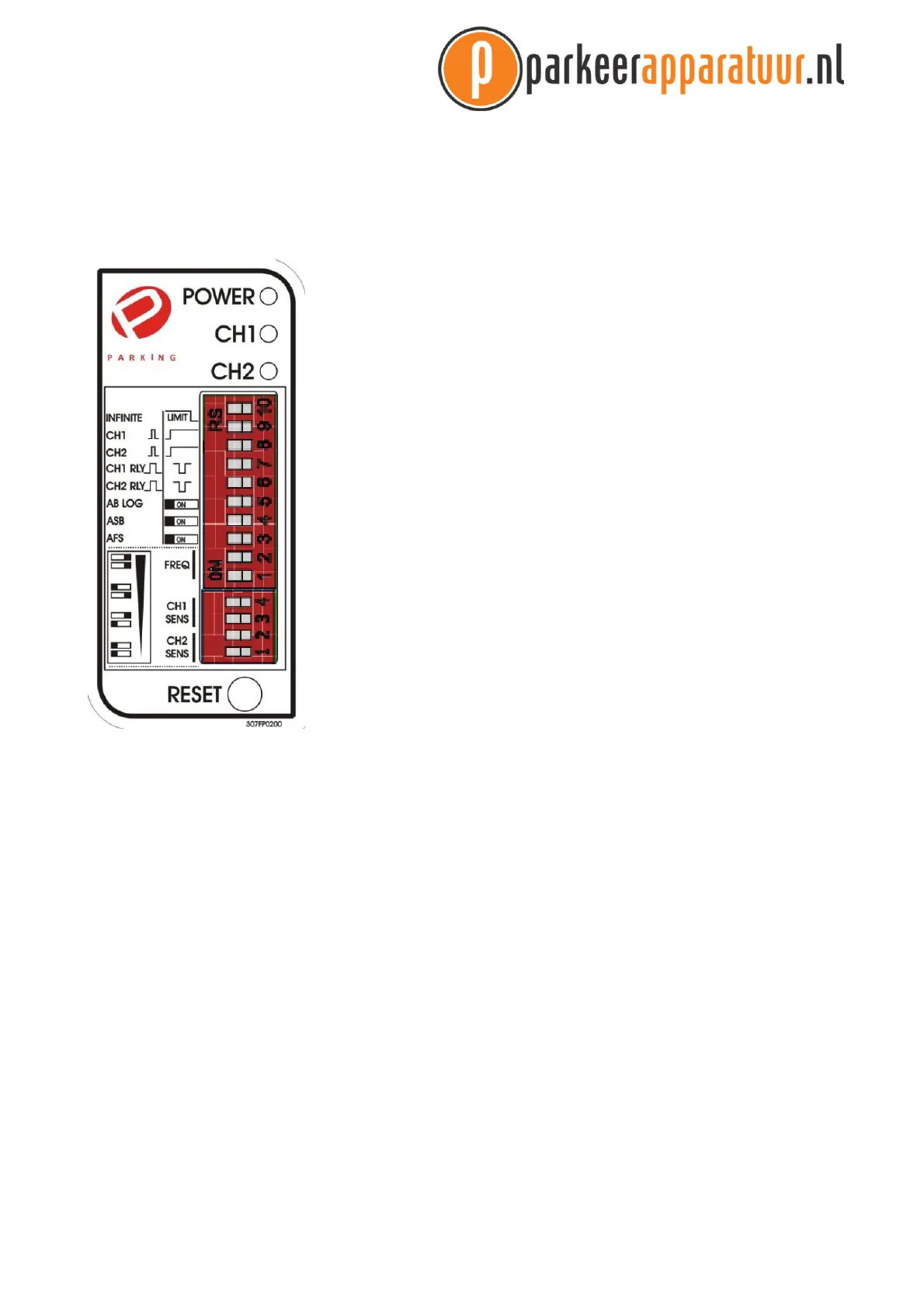
Figure 3. PD27x Faceplate