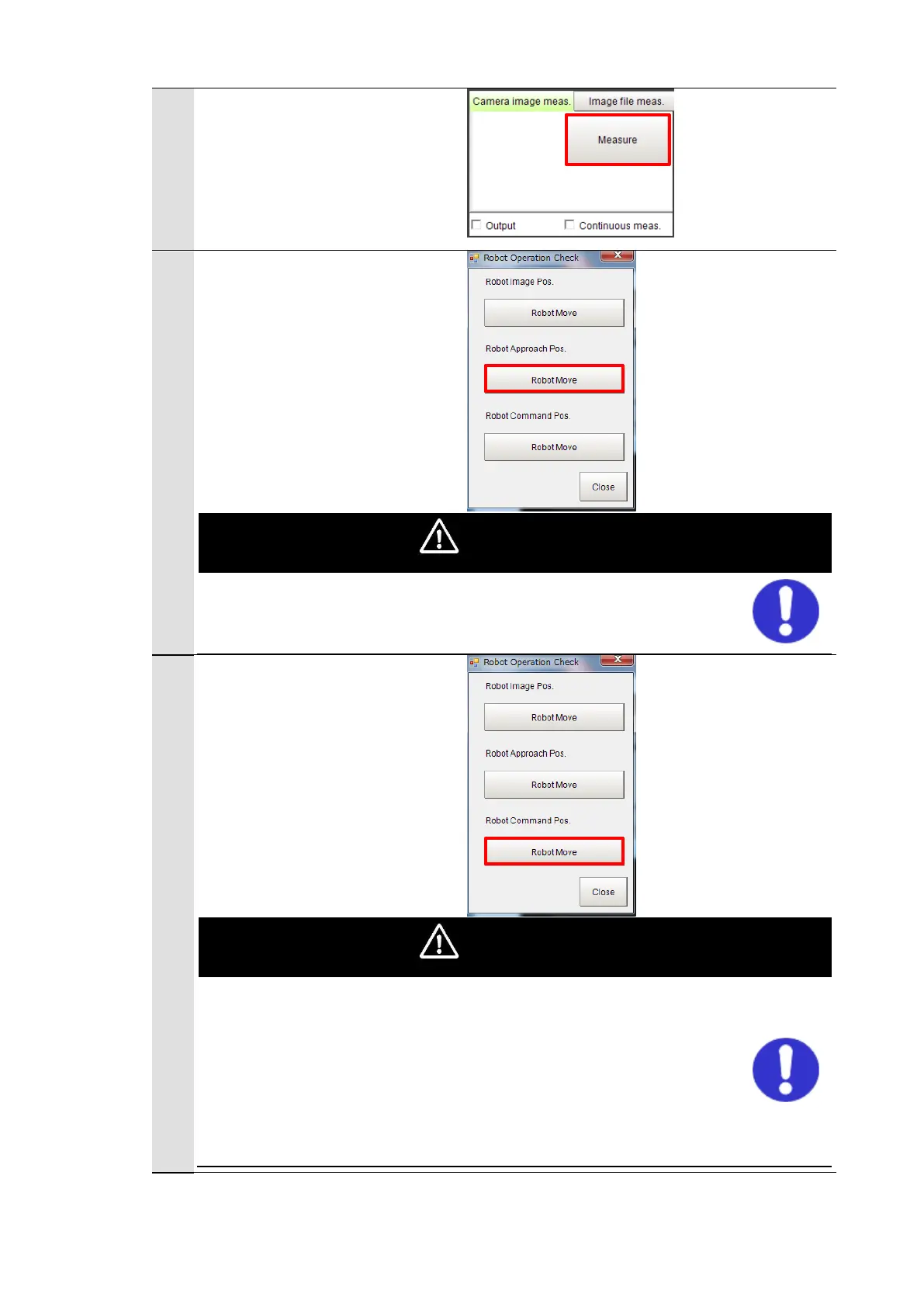
Select [Camera image meas.]
on the Main Window of the
Vision Sensor and detect a
workpiece position for
Pick/Place with clicking
[Measure].
Click [Robot Move] of the
“Robot Approach Pos.” on the
“Robot Operation Check” dialog
and move the robot to the
approach position.
These operations drive the robot.
Operate the robot in the state whereby pressing the
[Emergency stop] button can stop its motion anytime.
Click [Robot Move] of the
“Robot Command Pos.” on the
“Robot Operation Check” dialog
and move the robot to the
command position.
These operations drive the robot.
Operate the robot in the state whereby pressing the
[Emergency stop] button can stop its motion anytime.
Check the measurement results before the robot operation.
The robot may produce unexpected motion.
Change positions and angles of the workpiece for Pick/Place
to check the operation sufficiently.

 Loading...
Loading...














